| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|
Mintav�teles rendszerek
Mintav�telez�s
A digit�lis sz�m�t�g�pek ir�ny�t�stechnikai felhaszn�ls�nak k�t fő ter�lete van:
a. Digit�lis szimul�ci�, amikor az ir�ny�t�si rendszert sz�m�t�g�pen modellezik
b. Digit�lis ir�ny�t�s, amikor az ir�ny�t�s szerves r�sze a sz�m�t�g�p, vagy annak egyes feladatait �tveszi.
A digit�lis adatfeldolgoz� rendszerekben a jeleket mintav�telezz�k, majd digitaliz�ljuk. Eredm�ny�l diszkr�t jelet kapunk, amelyek amplit�d�ban �s időben kvant�ltak. Ezt a folyamatot a 1. �bra szeml�lteti. Az anal�g jelektől elt�rően, az �gy elő�ll�tott jeleknek csak diszkr�t időpillanatban vannak �rt�kei, amelyek szint�n diszkr�tek. A folyamat eredm�nyek�ppen amplit�d� modul�lt impulzus sorozat j�tt l�tre, amelyben az �lland� ti sz�less�gű impulzusok amplit�d�ja, illetve az impulzusok ter�lete ar�nyos a folytonos jel amplit�d�j�val. A k�zel�t�s ann�l pontosabb, min�l kisebb a mintav�teli peri�dus idő.
1: �bra: Diszkretiz�l�s időben �s amplit�d�ban.
Az amplit�d� felfel� vagy lefel� van kerek�tve az amplit�d� kvant�l�s eredm�nyek�ppen. A mintav�telez�s �ltal�ban �lland� To mintav�teli peri�dus idővel t�rt�nik. A digitaliz�lt jel a mikroprocesszor bemeneti adata lesz, amely a kimenő jelet a programozott jelfeldolgoz� algoritmusnak megfelelően �ll�tja elő. Ha a beavatkoz� szerv anal�g jelet ig�nyel, a kimeneti jelet D/A �talak�t� �s tart� eszk�z seg�ts�g�vel visszaalak�thatjuk anal�g jell�. A bemeneti �s kimeneti mintav�telez�s nem szinkron t�rt�nik, k�z�tt�k Tr időintervallum telik el. A Tr időintervallum egyr�szt a konverzi�s időből, �s a jelfeldolgoz�si időből tevődik �ssze. A mintav�teles jelfeldolgoz�s folyamat�br�ja a k�vetkező �br�n l�that�. Tr elhanyagolhat�, ha sokkal kisebb, mint a beavatkoz� szervek, �rz�kelők, �s a folyamat idő�lland�i. Ugyanilyen megfontol�sb�l, 16 bites vagy nagyobb sz�hossz�s�g� processzor �s 10 bitesn�l nagyobb felbont�s� A/D konverterek eset�n, a diszkr�t idejű jel a vizsg�latokhoz első k�zel�t�sben folytonos jelszintűnek tekinthető.
2 �bra: Digit�lis jelfeldolgoz�s blokkv�zlata.

3. �bra: fizikai �s matematikai mintav�telez�s
Az impulzusok sz�less�ge a mintav�teli l�p�sk�zh�z k�pest kicsi. Ez�rt nagyobb hiba n�lk�l helyettes�thetj�k a mintav�telezett impulzusokat azonos ter�letű Dirac impulzusokkal. Ez�ltal az idealiz�lt matematikai mintav�telez�shez jutunk, ami a mintav�teles rendszerek t�rgyal�s�t l�nyegesen leegyszerűs�ti. Figyelembe kell venni, hogy a mintav�telez�s inform�ci�veszt�st jelent, mivel csak a mintav�teli pontokban ismert a jel �rt�ke. Az y(t) �s yd (t) jelek k�z�tti kapcsolat nem k�lcs�n�sen egy�rtelmű. Az inform�ci� veszt�s cs�kken a mintav�teli frekvencia n�vel�s�vel.
A digit�lis szab�lyoz�k kimenete diszkr�t idejű jel, amelyet folytonos idejűv� kell alak�tani. Ezt a D/A �talak�t� v�gzi. E folyamat k�t r�szre oszthat�: dek�dol�sra �s tart�sra. A dek�dol�s folyam�n a diszkr�t idejű digit�lis jelből anal�g impulzusok lesznek. Az anal�g impulzus sorozatb�l a tart� �ramk�r folytonos idejű jelet �ll�t elő. T�bbf�le tart��ramk�r lehets�ges, att�l f�ggően, hogy a megelőző n darab diszkr�t idejű �rt�kből milyen extrapol�ci�val t�rt�nik a kimenő jel elő�ll�t�sa.
Z�rusrendű tart� �ramk�r a legegyszerűbb. Az nTs �s (n+1)Ts időpontok k�z�tt ekkor y(nTs) �lland� �rt�k a kimenet.
Ez l�pcsős g�rb�t jelent. A z�rusrendű tart�szerv �tviteli f�ggv�nye:
![]()
Az első rendű tart� �ramk�r az nTs �s (n+1)Ts időpontok k�z�tt az y(nTs) �s y((n-1)Ts) �rt�kekből k�pez egyenest. A m�sodrendű tart�k az extrapol�ci�t parabola seg�ts�g�vel v�gzi. Gyakorlatban a z�rusrendű tart�nak a jelentős�ge a legnagyobb.
A mintav�telezett jelek matematikai le�r�sa
Az időtartom�nyban a mintav�telezett jeleket Dirac impulzusokb�l �ll� sorozatk�nt ihatjuk le:
![]()
A mintav�telezett jelek le�r�sa a frekvencia tartom�nyban a Laplace transzform�ci� seg�ts�g�vel lehets�ges. A mintav�telezett jelsorozat Laplace transzform�ltja az eltol�si t�tel felhaszn�l�s�val:
![]()
A ![]() jel�l�st bevezetve
kapjuk a diszkr�t idejű jel z transzform�ltj�t, vagy diszkr�t Laplace
transzform�ltj�t:
jel�l�st bevezetve
kapjuk a diszkr�t idejű jel z transzform�ltj�t, vagy diszkr�t Laplace
transzform�ltj�t:
![]()
A z v�ltoz�t k�sleltet�si, vagy eltol�si oper�tornak is tekinthetj�k, ahol a z-k egy�tthat�val val� szorz�s azt jelzi, h�nyadik a jel a mintav�telezett jelsorozatban. Ha egy jelsorozatot z-vel szorzunk, a művelet eredm�nyek�ppen a jelsorozat időben negat�v ir�nyban tol�dik el. Ugyan�gy, a z -el t�rt�nő szorz�s időben k�sleltet�st jelent.
E felfog�s szerint a transzform�ci� m�s megk�zel�t�ssel is bevezethető.
Egy x=x[k] diszkr�t idejű jelsorozat X(z)=Z diszkr�t idejű Laplace transzform�ltja, m�s n�ven z transzform�ltja a k�vetkező:
![]()
A z v�ltoz� dimenzi� n�lk�li mennyis�g, vagy n�ha radi�n m�rt�kegys�gben adj�k meg, mint a diszkr�t idejű k�rfrekvenci�t.
A jeleket bel�pő
jeleknek tekintj�k, azaz ![]() ha k < 0.
ha k < 0.
Az inverz z transzform�ci�elvileg az inverzi�s integr�llal hajthat� v�gre:
![]()
k eg�sz sz�m.
Az inverzi�s integr�l ki�rt�kel�se azonban �ltal�ban neh�z, �gy m�s m�dszereket haszn�lunk, hasonl�an az inverz Laplace transzform�ci�hoz.
A z transzform�ci� tulajdons�gai �s az inverz z transzform�ci�s m�dszerek
1.2. Az impulzusok �s az egys�gugr�s transzform�ltjai.
A DI egys�gimpulzus z transzform�ltja.
A diszkr�t idejű egys�gimpulzus (d d[k] = 0 egy�bk�nt) z transzform�ltja a definici�b�l k�vetkezik:
Z = 1. (9.)
Hasonl�an l�that� be, hogy:
Z = z-r (10.)
Ebből k�vetkezik, hogy a v�ges hossz�s�g� bel�pő DI jel z transzform�ltja a z-1 v�ltoz� polinomja:
 (11.)
(11.)
Ez kifejezhető a z k�t polinomj�nak h�nyadosak�nt:
![]() (12.)
(12.)
A DI egys�gugr�s transzform�ltja.
A definici�s k�pletbe helyettes�tve:
![]() (13.)
(13.)
A m�rtani sor konverges, ha ![]() , azaz, ha
, azaz, ha ![]() A m�rtani sort m�sk�ppen fel�rva:
A m�rtani sort m�sk�ppen fel�rva:
![]() (1)
(1)
A Laplace transzform�ci� definici�j�b�l k�vetkezik, hogy az f[k]=1, vagy a g[k]=2-e[k] DI jel transzform�ltja megegyezik e[k] transzform�ltj�val, vagyis F(z)=G(z)=z/(z-1).
Linearit�s:
Mind a transzform�ci�, mind az inverz transzform�ci� line�ris:
![]() (15.)
(15.)
![]() (16.)
(16.)
Csillap�t�si t�tel:
B�rmely komplex q sz�m eset�n:
![]() (17.)
(17.)
Ha q val�s, �s -1<q<+1, akkor az x szorz�t�nyezőjeaz időtartom�nyban exponenci�lis csillap�t�st jelent. Innen kapta a t�tel a nev�t. Az igazol�s egyszerű, nem r�szletezz�k.
A t�tel alkalmaz�sak�nt kapjuk:
 (18.)
(18.)
Gyakori előfordul�sa miatt �rdemes megjegyezni:
![]()
K�sleltetett bel�pő jel transzform�ltja.
Ha X(z)=Z, akkor
![]() (20.)
(20.)
A t�telt eltol�si vagy k�sleltet�si t�telnek is nevezik.
Nem bel�pő jel k�sleltet�se.
Ha X(z)=Z, akkor a k�sleltetett jel z transzform�ltja:
![]() (21.)
(21.)
A k�sleltetett jel z transzform�ltj�t X(z) nem hat�rozza meg, mert annak sz�m�t�sakor az
x[-1], x[-2], �rt�keket null�nak tekintett�k, teh�t ezeket k�l�n-k�l�n figyelembe kell venn�nk. Ha ezek �rt�ke nulla, akkor az egyenlet a (20.) form�ra egyszerűs�dik.
Speci�lisan r=1 �s r=2 eset�n:
 (22.)
(22.)
Siettetett DI jel
Ha X(z)=Z, akkor az egy �temmel siettetett (h�tratolt) jel transzform�ltja:
![]() (23.)
(23.)
Az �ltal�nos�t�s t�bb �temre nem okoz neh�zs�get, itt nem foglalkozunk vele.
Bel�pő jelek konvol�ci�ja:
A k�t bel�pő jel konvol�ci�j�nak z transzform�ltja transzform�ltjuk szorzata.
![]() (2)
(2)
Inverz z transzform�ci�
Az X(z) z transzform�ltnak megfelelő diszkr�t x[k] jelet az X(z) inverz z transzform�ltj�nak nevezz�k. Az inverz z transzform�ltat k�l�nf�le m�dszerekkel hat�rozhatjuk meg:
R�szt�rtekre bont�ssal �s z transzform�ci�s t�bl�zat seg�ts�g�vel
Polinom oszt�ssal
Differencia egyenelt megold�sra visszavezetve
Komplex inverzi�s integr�llal.
A m�dszerekre a k�vetkezőkben mutatunk p�ld�kat.
R�szt�rtekre bont�s m�dszere
A jel z tartom�nybeli alakj�t parci�lis t�rtek �sszeg�re bontjuk, �s az �gy nyert r�szt�rteket t�bl�zatb�l kikeress�k. Az eredm�ny az egyes tagok �sszege lesz.
Legyen
![]()
A parci�lis t�rtekre bontott alak:
![]()
az A �s B egy�tthat�kat meg kell hat�rozni.
![]()
z=1 eset�n B=5,
Z=0.4 �rt�kkel pedig A=-2 ad�dik.
![]()
T�bl�zatb�l visszakeresve a diszkr�t jelet:
![]()
![]()
![]()
Polinom oszt�s
A m�dszer akor haszn�lhat�, ha a jelek egyoldal�ak, vagyis csak pozit�v vagy csak negat�v időpontokban fell�pő jelek. Ha a z transzform�ltat polinomok h�nyadosak�nt �rjuk fel, cs�kkenő kitevőkkel. A k�t polinomot elosztva az eredm�nyt z v�gtelen sorak�nt kapjuk, �s a z egy�tthat�i adj�k a diszkr�t x k impulzussorozat elemeit.
P�lda:
![]()
Ezt �t kell alak�tani z -1 hatv�nyai szerinti polinomok h�nyados�v�:
![]()
Az oszt�s eredm�nye:
Az oszt�s eredm�nye:
![]()
Az ![]()
![]()
![]()
egyenlet alapj�n a diszkr�t jelsorozat a k�vetkező:
x(0)=0
x(1)=10
x(2)=17
x(3)=18.4
x(4)=18.68
A m�dszerrel �ltal�ban nem kapunk z�rt form�t az időf�ggv�nyre. De a sz�m�t�s tetszőleges pontoss�gig folytathat�.
N�ha az eredm�ny z�rt kifejez�sk�nt kaphat�, pl az al�bbi esetben:
Ez �t�rhat� a k�vetkező form�ba:
![]()
Az oszt�s eredm�nye:
![]()
Azaz, a diszkr�t jelsorozat z�rt form�ban �rhat� fel:
![]()
Inverz transzform�ci� differenciaegyenlet megold�ssal
A m�dszer előnye, hogy algoritmiz�lhat�. Legyen a z tartom�nyban adott jel bel�pő f�ggv�ny, �s a k�vetkező egyenlettel adott:
![]()
![]() �rjuk fel az al�bbi alakban:
�rjuk fel az al�bbi alakban:
![]()
Ahol az u(z) gerjeszt�s a
Dirac delta z transzform�ltja,
mivel ![]()
Rendezz�k �t az egyenletet:
![]()
Majd alak�tsuk �t a kifejez�st differencia egyenlett�:
![]()
Mivel u[k] a diszkr�t egys�g impulzus, u[k]=1, ha k=0, �s u[k]=0, ka k?0.
Legyen k=-2. Ekkor az egyenlet:
![]()
A kezdeti �rt�kek: x[-1]=x[-2]=0, mivel bel�pő jel, u[-1]=u[-2]=0, mivel egys�g impulzus.
�gy a megold�s elsőtagja:
x[0]=0
Helyettes�ts�nk be k=-1-et.
![]()
A kezdeti �rt�kek: x[0]=0, az el�bb m�r ezt meghat�roztuk, x[-1]=0, u[0]=1, u[-1]=0,
A m�sodik tag:
X[1]=10
Helyettes�ts�nk be k=0-t. A k�vetkező megoldand� differencia egyenlet:
![]()
A kezdeti felt�telek: x[0]=0, x[1]=10, u[0]=1, u[1]=0.
A harmadik tag:
X[2]=17
Helyettes�ts�nk be k=1-t. A k�vetkező megoldand� differencia egyenlet:
![]()
A kezdeti felt�telek: x[0]=0, x[1]=10,x[2]= 17, u[0]=1, u[1]=0.
A negyedik tag:
X[3]=18.4
A k�vetkező differencia egyenletekben az u[k] �rt�keire mindig 0-t kapunk. A sz�m�t�sok r�szletez�s�nek mellőz�s�vel az eredm�nyek:
x[4]=18.68
x[5]=18.736
x[6]=18.742
x[7]=18. 7495
x[8]=18.7499�
Sz�m�t�sunk eredm�ny megegyezik a r�szt�rtekre bont�s �s a polinomoszt�s m�dszer�vel kapott eredm�nyekkel.
De ellenőrizhetj�k sz�m�t�sainkat a kezdeti �s a v�g�rt�k t�telekkel is:

![]()
Oldjuk meg differencia egyenlett� alak�t�ssal a k�vetkező visszatranszform�l�si feladatot is, amelynek v�geredm��ny�t polinomoszt�ssal m�r k�z�lt�k. X(z) bel�pő f�ggv�ny:
Alak�tsuk �t differencia egyenlett�:
![]()
![]()
Legyen n=-2,
![]()
x[0]=0
Legyen n=-1,
![]()
x[1]=0
Legyen n=0,
![]()
![]()
Legyen n=1
![]()
![]()
![]()
Legyen n=2
![]()
![]()
![]() �
�
A mintav�telezett jelsorozat:
![]() ,
, ![]() ,
, ![]() ,
, ![]() �, megegyezik
az előbbi jelsorozattal.
�, megegyezik
az előbbi jelsorozattal.
A folytonos idejű rendszerek diszkr�t modellje
a diszkr�t idejű szab�lyoz�t folytonos modellel helyettes�tj�k �s folytonos idejű a szab�lyozott folyamat,
a diszkr�t idejű szab�lyoz�hoz diszkr�t idejű folyamat modellt �ll�tunk elő.
A szab�lyoz�si k�r vizsg�latakor c�lszerű a folytonos modell c�lszerűbb, mivel �gy a rendszer mintav�teli pontok k�z�tti viselked�se is megismerhető.
A folytonos �s diszkr�t idejű rendszerek
k�zti �sszef�gg�st az s �s a z tartom�ny k�z�tt a ![]() �sszef�gg�s �rja le. A
konvert�l�sra sz�mos m�dszer l�tezik, k�z�l�k n�h�nyat a k�vetkező r�sz
ismertet. A m�dszerek egy r�sze az azonos bemenő jelek hat�s�ra adott
azonos v�laszon alapul. Mind a folytonos, mind a diszkr�t rendszer kimenő
jeleinek azonosaknak kell lenni a mintav�teli pillanatokban. Ide tartoznak az
egys�g ugr�s �s egys�g sebess�g invari�ns m�dszerek. A m�dszerek egy m�sik
csoportja pedig a szimul�ci�s m�dszerekből sz�rmazik. Ilyen p�ld�ul a
biline�ris k�zel�t�s, mely a trap�z m�dszerből sz�rmazik, vagy a
differencia egyenlet m�dszer.
�sszef�gg�s �rja le. A
konvert�l�sra sz�mos m�dszer l�tezik, k�z�l�k n�h�nyat a k�vetkező r�sz
ismertet. A m�dszerek egy r�sze az azonos bemenő jelek hat�s�ra adott
azonos v�laszon alapul. Mind a folytonos, mind a diszkr�t rendszer kimenő
jeleinek azonosaknak kell lenni a mintav�teli pillanatokban. Ide tartoznak az
egys�g ugr�s �s egys�g sebess�g invari�ns m�dszerek. A m�dszerek egy m�sik
csoportja pedig a szimul�ci�s m�dszerekből sz�rmazik. Ilyen p�ld�ul a
biline�ris k�zel�t�s, mely a trap�z m�dszerből sz�rmazik, vagy a
differencia egyenlet m�dszer.
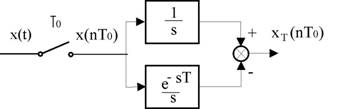
Egys�g ugr�s invari�ns m�dszer, vagy z�rusrendű tart� m�dszer. A m�dszer �ltal eredm�nyezett diszkr�t �s az eredeti folytonos rendszer egys�g ugr�sra adott v�lasza megegyezik a mintav�teli pillanatokban. A szab�lyozott szakasz el� z�rusrendű tart� �ramk�rt m�g�, pedig egy mintav�telező �ramk�rt t�telez�nk fel, �gy az eredm�ny�l kapott rendszer bemenete �s kimenete egyar�nt digit�lis lesz. A z�rusrendű tart�t �s a mintav�telezőt is bevonjuk a konverzi�ba. A konverzi�s egyenlet:
![]()
az egyenletben a Z oper�tor a z transzform�ci�t, L-1 pedig az inverz Laplace transzform�ci�t jelenti. A m�dszert a szab�lyozott szakasz konvert�l�s�ra haszn�lj�k. Nem megfelelő azonban a m�dszer a szab�lyoz� diszkretiz�l�s�ra, mivel a z�rusrendű tart� �ramk�r f�zis k�sleltet�st, valamint a frekvencia �tvitelben torz�t�st okoz.
Egys�g sebess�g invari�ns m�dszer. Ha a bemeneti egys�gugr�s jel helyett egys�g sebess�g jelet haszn�lunk, az egys�g sebess�g invari�ns, vagy elsőrendű tart� m�dszerhez jutunk. A folytonos �s a kapott diszkr�t rendszer v�lasza ez esetben az egys�g sebess�g jel eset�n egyezik meg. A konverzi�s egyenlet a k�vetkező:
![]()
A m�dszer elfogadhat� eredm�nyt ad folytonos idejű szab�lyoz�k konvert�l�sa eset�n is.
Differencia egyenlet m�dszer. A m�dszer eset�n a f�ggv�ny differenci�lh�nyados�t az aktu�lis �s az azt megelőző mintav�telezett �rt�k k�l�nbs�g�vel helyettes�tj�k:
![]()
Ennek megfelelően a konverzi�s egyenlet a k�vetkező lesz:
![]()
Biline�ris, vagy Tustin transzform�ci�: A m�dszer a numerikus integr�l�sb�l sz�rmazik, trap�z k�zel�tő m�dszernek is nevezik. A konverzi�s egyenlet a k�vetkező:
![]()
A m�dszer az s tartom�ny bal oldal�nak fs, mintav�teli frekvenci�val hat�rolt s�vj�t k�pezi le a z s�k egys�gsugar� k�r�nek belsej�re. A mintav�teli frekvenci�t ez�rt a lehető legnagyobbra kell v�lasztani, hogy lehetős�g szerint a folytonos rendszer �sszes p�lus�t mag�ba foglalja. A leggyakrabban haszn�lt m�dszer, amellyel mindig stabil rendszert kapunk, ha az eredeti folytonos rendszer stabil volt.
Diszkr�t idejű rendszerek �tviteli f�ggv�nye
A diszkr�t idejű �tviteli f�ggv�ny fel�r�s�hoz iduljunk ki egy egyszerű �tviteli tagb�l, amely az n-ik kimeneti jelet k�t egym�s ut�ni bemenő jelből, az n-ik �s n-1-ik mitav�teli �rt�kből �tlagol�ssal �ll�tja elő:
![]() .
.
�rjuk fel a z transzform�ltat:
![]() .
.
A diszkr�t idejű processzor �tviteli f�ggv�ny�t kapjuk, ha a kimenő jel �s a bemenő jel h�nyados�t k�pezz�k:
![]()
Az �tviteli f�ggv�nyt �t�rva z pozit�v hatv�nyaival, a k�vetkező kifejez�st kapjuk:
![]()
A W (z) �tviteli f�ggv�ny rendszerjellemző, megadja, hogyan �ll�tja elő a diszkr�t processzor a kimenő jelsorozatot a bemenő jelsorozatb�l. Ha adott az �tviteli f�ggv�ny, a bemenő jelsorozatb�l elő�ll�that� a kimenő jelsorozat:
![]()
Ha a bemenő jel a mintav�telezett egys�g impulzus, d[n], a kimenet az egys�g impulzus v�lasz f�ggv�ny, h[n] lesz. A z transzform�ltakkal:
![]()
Egy line�ris diszkr�t idejű processzor �tviteli f�ggv�nye egyenlő a mintav�telezett egys�g impulzusra adott v�lasz f�ggv�nnyel.
Az �tviteli f�ggv�nyről anyag a CD mell�kletben tal�lhat�.
Diszkr�t idejű tagok frekvencia �tviteli f�ggv�nye
A diszkr�t idejű tag frekvencia
�tviteli f�ggv�ny�t az impulzus �tviteli f�ggv�nyből ![]() helyettes�t�s �tj�n kapjuk. Sajnos, wd(j)
transzcendes f�ggv�ny, ez�rt a frekvencia diagram komplik�lt, az aszimptotikus
k�zel�t�s nem alkalmazhat�. Fel�rhat� a mintav�telezett jel spektruma.
helyettes�t�s �tj�n kapjuk. Sajnos, wd(j)
transzcendes f�ggv�ny, ez�rt a frekvencia diagram komplik�lt, az aszimptotikus
k�zel�t�s nem alkalmazhat�. Fel�rhat� a mintav�telezett jel spektruma.
A spektrum meghat�roz�s�hoz a mintav�telezett jelet az al�bbi form�ban �rjuk fel:
![]()
Az yd(jw) frekvencia spektrum ebből a k�vetkező alak� lesz:
![]()
A k�pletben ![]() a mintav�teli
k�rfrekvencia, y(0) a jel �rt�ke a t=0 időpontban. Az eredeti spektrum
a mintav�teli
k�rfrekvencia, y(0) a jel �rt�ke a t=0 időpontban. Az eredeti spektrum ![]() szeres�re v�ltozik, �s
a
szeres�re v�ltozik, �s
a ![]() frekvenci�k k�r�l periodikusan ism�tlődik.
frekvenci�k k�r�l periodikusan ism�tlődik.
�bra: a mintav�telezett jel spektruma.
A vissza�ll�tott jel spektruma ( Shannon t�tel).
Min�l kisebbek a jel nagyfrekvenci�s
�sszetevői �s nagyobb a mintav�teli frekvencia, a jel helyre�ll�t�sa ann�l
jobb lesz. Ha y(jw) spektruma a ![]() hat�rok k�z�
esne, megfelelően nagy mintav�teli frekvencia eset�n a jel t�k�letesen
helyre�ll�that� lenne. A sz�ks�ges mintav�teli frekvenci�ra vonatkoznak a
Shannon f�le mintav�telez�si t�telek.
hat�rok k�z�
esne, megfelelően nagy mintav�teli frekvencia eset�n a jel t�k�letesen
helyre�ll�that� lenne. A sz�ks�ges mintav�teli frekvenci�ra vonatkoznak a
Shannon f�le mintav�telez�si t�telek.
A mintav�teli frekvenci�nak a jel wh hat�rfrekvenci�j�nak k�tszeres�n�l nagyobbra kell v�lasztani.
A jelet olyan alul�teresztő szűrővel lehet helyre�ll�tani, amely az w<wh tartom�nyban Ts szeres erős�t�ssel viszi �t a jelet, e frekvenci�k felett pedig v�g.
A Shannon t�telek t�j�koztat�st adnak a mintav�teli frekvencia minim�lis �rt�k�re, de csak elm�leti hat�reseteket fogalmaznak meg. A val�s�gban a jelek v�gtelen sok felharmonikust tartalmaznak. Emellett a kimeneti alul�teresztő szűrők karakterisztik�ja sem ide�lis. Ezen okok miatt mintav�telez�s miatt mindig keletkezik hiba. A digit�lis jelfeldolgoz� rendszerek �ra nagym�rt�kben f�gg a megval�s�tand� mintav�teli frekvenci�t�l, az mindig az �r �s a megengedett inform�ci� veszt�s k�z�tti kompromisszum eredm�nye. A mintav�teli frekvencia cs�kkenthető, ha a bemenő jel frekvenci�j�t korl�tozzuk. Ez�rt a bemeneten is alkalmaznak alul�teresztő szűrőt, amely a feldolgoz�s szempontj�b�l �rdektelen frekvenci�kat kiszűri.
A folytonos rendszerek stabilit�s�nak a
felt�tele volt, hogy a z�rt rendszer p�lusai a komplex s�kon a j
tengelytől balra helyezkedjenek el. stabilit�s�ra vonatkoz�, a rendszer p�lusaira vonatkoz� defin�ci�k
diszkr�t rendszerekre is �rv�nyesek. Ezt a felt�telt kell �talak�tani a z
tartom�nynak megfelelően. Ehhez a ![]() �sszef�gg�s szerint kell az s s�k pontjait a z s�kra
lek�pezni. Ha az s s�kon kiindulunk a k�pzetes tengely ment�n a jw=0 pontb�l a
pontba pontba, a z s�kon egy teljes egys�gsugar� k�rt �runk le, az �ramutat�
j�r�s�val ellent�tesen. A jw tengelytől balra eső pontok az egys�g
sugar� k�r belsej�be ker�lnek. Vagyis, a diszkr�t idejű rendszerek
stabilak, ha �sszes p�lusuk az egys�gsugar� k�r�n bel�l fekszik.
�sszef�gg�s szerint kell az s s�k pontjait a z s�kra
lek�pezni. Ha az s s�kon kiindulunk a k�pzetes tengely ment�n a jw=0 pontb�l a
pontba pontba, a z s�kon egy teljes egys�gsugar� k�rt �runk le, az �ramutat�
j�r�s�val ellent�tesen. A jw tengelytől balra eső pontok az egys�g
sugar� k�r belsej�be ker�lnek. Vagyis, a diszkr�t idejű rendszerek
stabilak, ha �sszes p�lusuk az egys�gsugar� k�r�n bel�l fekszik.
�ltal�nos esetben a diszkr�t rendszer �tviteli f�ggv�nye t�rt, melynek sz�ml�l�ja m-ed fok�, nevezője pedig n-ed fok� polinom:
![]() .
.
A karakterisztikus egyenlet, D(z) gy�kei meghat�rozz�k a rendszer tranziens viselked�s�t.
Ha a bemenő jel egys�gimpulzus, �s a kezdeti �rt�kek z�russal egyenlők, a kimenő jel, azaz a rendszer egys�g impulzusra adott v�lasz f�ggv�nye megegyezik az �tmeneti f�ggv�nnyel, amint ezt m�r kor�bban le�rtuk:
![]()
A diszkr�t idejű rendszer stabil, ha az impulzus v�lasz aszimptotikusan z�rushoz tart. Az al�bbi �bra a k�l�nb�ző gy�k�kh�z tartoz� v�laszf�ggv�nyeket foglalja �ssze.

Diszkr�t idejű tag Wd(jω) frekvencia �tviteli f�ggv�nye a Wd(z) impulzus�tviteli f�ggv�nyből
![]()
helyettes�t�ssel sz�rmaztathat�.
Wd (jω) az ω v�ltoz�nak transzcendens f�ggv�nye, ez�rt a frekvencia diagram menet�ről gyors �ttekint�st ad� aszimptotikus k�zel�t�s k�zvetlen�l nem alkalmazhat�.
�gy b�r a z transzform�ltb�l a tag diszkr�t idejű Fourier spektruma z�rt kifejez�sben rendelkez�sre �ll, az nem t�kr�zi el�gg� szeml�letesen sem a frekvencia g�rbe menet�t, sem a folytonos �s a diszkr�t idejű jelek frekvencia spektrumai k�z�tti �sszef�gg�st.
6.6.1 A mintav�telezett jel frekvencia spektruma
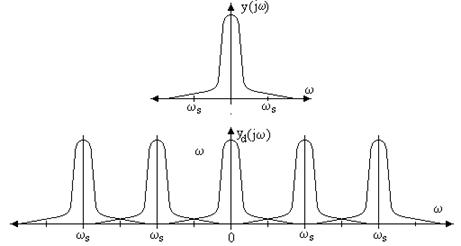
Jel�lje y(jω) egy folytonos idejű y jel frekvencia spektrum�t (6.20a �bra). A Ts idők�z�nk�nti mintav�telez�ssel elő�ll�tott yd jel yd(jω) frekvencia spektruma a 6.11 p�ld�ban bemutatott elj�r�ssal az al�bbi alakban fejezhető ki:
ahol ![]() a mintav�telez�si k�rfrekvencia, y(0) pedig az
y jelnek a t=0 pontban az esetleges ugr�sa.
a mintav�telez�si k�rfrekvencia, y(0) pedig az
y jelnek a t=0 pontban az esetleges ugr�sa.

6. 20 �bra: a mintav�telezett jel spektruma.
A mintav�telez�s hat�s�ra az y f�ggv�ny ω=0 k�r�li y(jω)
frekvencia spektruma (az un. főeloszl�s) 1/Ts-szeres�re
v�ltozik �s ezen k�v�l a �Ω; �2Ω stb. frekvenci�k k�r�l � az un.
oldals�vokban � a főeloszl�ssal azonos j�rul�kos eloszl�sok jelennek meg.
A fő �s a j�rul�kos eloszl�sok �sszege ![]() -vel n�velve adja a diszkr�t idejű amplit�d� spektrumot
� a diszkr�t frekvencia f�ggv�nyt � (b �bra). Az �br�n felt�telezt�k, hogy
y(0)=0; Ts=1 �s yd(jω) val�s f�ggv�ny. (Val�j�ban yd(jω)
�ltal�ban komplex, ekkor az �bra a mindig val�s 0,5yd(jω)yd(-jω)
un. energia spektrumot t�nteti fel.)A diszkr�t spektrumban a
-Ω/2≤ω≤Ω/2 fős�v eloszl�sa � amely ω=0-ra
szimmetrikus � mindk�t ir�nyban peri�dikusan ism�tlődik. Ez�rt az yd(jω)
f�ggv�nyt � a szimmetri�t is figyelembe v�ve � elegendő az ω=0 �s
ω=Ω/2=П/Ts k�z�tti frekvencia �rt�kekre
meghat�rozni.
-vel n�velve adja a diszkr�t idejű amplit�d� spektrumot
� a diszkr�t frekvencia f�ggv�nyt � (b �bra). Az �br�n felt�telezt�k, hogy
y(0)=0; Ts=1 �s yd(jω) val�s f�ggv�ny. (Val�j�ban yd(jω)
�ltal�ban komplex, ekkor az �bra a mindig val�s 0,5yd(jω)yd(-jω)
un. energia spektrumot t�nteti fel.)A diszkr�t spektrumban a
-Ω/2≤ω≤Ω/2 fős�v eloszl�sa � amely ω=0-ra
szimmetrikus � mindk�t ir�nyban peri�dikusan ism�tlődik. Ez�rt az yd(jω)
f�ggv�nyt � a szimmetri�t is figyelembe v�ve � elegendő az ω=0 �s
ω=Ω/2=П/Ts k�z�tti frekvencia �rt�kekre
meghat�rozni.
A mintav�teles jel frekvencia spektrum�nak meghat�roz�sa
A mintav�telez�s olyan amplit�d� modul�ci�b�l sz�rmaztathat�, amikor az y(t) folytonos idejű jelet egys�gnyi ter�letű, τ sz�less�gű egym�st Ts idők�z�kkel k�vető impulzusokb�l �ll� I impulzus sorozattal szorozzuk (6.21 a-b �bra). Az y(t) jelnek a c �bra szerint a t=0 pontban y(0) ugr�sa is lehet.
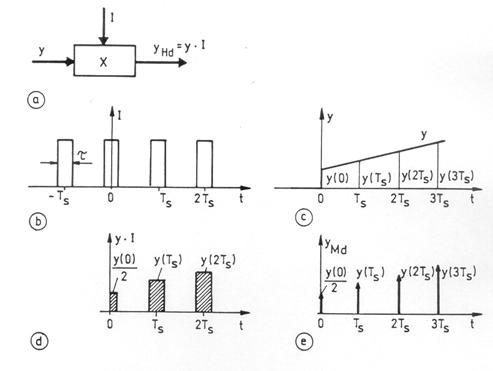
6.21. �bra: mintav�telezett folytonos jel.
A szorz�s eredm�nye olyan impulzus sorozat, amelyben az nTs pillanatban az eredetileg egys�gnyi impulzus ter�lete y(nTs)-re v�ltozik A t=0 pontbeli impulzus ter�lete azonban � mivel eredeti ter�let�nek a fele esett a pozit�vidő tartom�nyba � a d �bra szerint y(0)/2-re m�dosul. Ez�rt a v�ges sz�less�gű impulzusoknak Dirac impulzusokkal val� helyettes�t�s�ből elő�ll� yMd modul�lt sorozat (e �bra) nem egyezik meg teljesen az ud mintav�teles sorozattal, hanem
![]() , illetve
, illetve ![]()
Helyettes�ts�k I-ben is az impulzusokat Dirac f�ggv�nyekkel �s k�pezz�k az �gy elő�ll� Ts peri�dusidejű periodikus f�ggv�ny Fourier sor�t.
ahol Ω az ism�tlőd�si (mintav�telez�si) k�rfrekvencia: Ω=2π/Ts.
A cn komplex amplit�d� minden n-re:
Az integr�l�si tartom�nyban ugyanis I-nek egyetlen Dirac impulzusa van,
amely a t=0 pontot kiv�ve minden�tt z�rus, ott viszont egys�gnyi ter�letű.
Az integrandus m�sodik tagja pedig ugyanitt ![]() . Ezzel a (6.70b)-ből:
. Ezzel a (6.70b)-ből:
Jel�lj�k y(jω)-val a folytonos idejű frekvencia spektrumot (6.20a �bra) �s k�pezz�k a (6.71) egyenlet Fourier integr�lj�t (yd(jω)).
A műveletet tagonk�nt elv�gezz�k.

y(jω�jnΩ) az y(jω) folytonos jelű frekvencia spektrum �nΩ-val val� eltol�s�val j�n l�tre.
A mintav�telezett jel frekvencia spektruma az egyes tagok �sszege, amely megegyezik a (6.69) egyenlettel.
A vissza�ll�tott jel spektruma
Jelvissza�ll�t�skor a mintav�telezett jel yd(jω) spektrum�b�l igyeksz�nk valamilyen szűr�si elj�r�ssal kiv�lasztani a folytonos idejű jel y(jω) spektrum�t. A 6.20c �bra tanuls�ga szerint ez �ltal�ban nem oldhat� meg t�k�letesen, mert az y(jω)-val ar�nyos főeloszl�sb�l sz�rmaz� �sszetevő � amelynek k�l�nv�laszt�sa lenne az ide�lis megold�s � a j�rul�kos eloszl�sokb�l sz�rmaz� r�szekkel egy�tt jelentkezik (yH g�rbe).
Egyes frekvenciatartom�nyok kiszűr�se az �br�n egy ide�lis szűrővel a főeloszl�st is csonk�tja. A megmarad� spektrum m�g y(0)=0 eset�n is k�l�nb�zik y(jω)-t�l, mivel abban az oldals�vok hat�sa is jelen van. A frekvenciatartom�nyban �gy t�kr�ződik az időtartom�nyban trivi�lis jelens�g, hogy a mintav�telezett jel inform�ci�tartalm�b�l �ltal�ban nem lehet a mintav�teli pontok k�z�tti jelens�gekre k�vetkeztetni. A feladat k�zel�tő megold�s�ra haszn�lt szűrő � a tart�szerv � frekvencia karakterisztik�j�nak az ω=0 �s Ω/2 k�z�tti s�vban nagyj�b�l alakhű �tvitelt �s Ts-szeres erős�t�st, nagyobb frekvenci�kon viszont erőteljes szűr�st kell biztos�tania.
A szűr�si karakterisztika pontos alakja att�l f�gg, hogy a vissza�ll�tott jel yH(jω) spektruma milyen m�don k�zel�ti y(jω)-t. A k�l�nb�ző rendsz�m� tart�szervek ebben k�l�nb�znek egym�st�l.
A magasabb rendű tart�szervek a nagyobb frekvenci�kat erőteljesen elnyomj�k, ez�rt a vissza�ll�tott jel nem k�veti y(t) hirtelen v�ltoz�sait.
A z�rusrendű tart�szerv a nagyobb frekvenci�kat m�rs�keltebben szűri, de nagyobb torz�t�st ad a kisebb frekvenci�j� �sszetevőkben is.
Min�l kisebbek y(jω)
f�ggv�ny�ben a nagyfrekvenci�s �sszetevők �s min�l nagyobb Ω, ann�l
kev�sb� fedik �t egym�st a fő �s a j�rul�kos eloszl�sok, �s y(0)=0 eset�n
az ω<Ω/2 tartom�nyban ann�l ink�bb helyt�ll� az ![]() k�zel�t�s. Ha y(jω) spektrum csak a �ωh k�z� eső v�ges
tartom�nyra terjedne (6.22a �bra), elegendően nagy Ω eset�n az oldals�vok teljesen elk�l�n�ln�nek �s nem
befoly�soln�k a fős�v eloszl�s�t, amely �gy ar�nyos lenne y(jω)-val. Ekkor m�d ny�lna y(jω) ill. y teljes � inform�ci�vesztes�g n�lk�li � rekonstrukci�j�ra. A
diszkr�t �s a folytonos idejű jel k�z�tt k�lcs�n�sen egy�rtelmű lenne
a kapcsolat.
k�zel�t�s. Ha y(jω) spektrum csak a �ωh k�z� eső v�ges
tartom�nyra terjedne (6.22a �bra), elegendően nagy Ω eset�n az oldals�vok teljesen elk�l�n�ln�nek �s nem
befoly�soln�k a fős�v eloszl�s�t, amely �gy ar�nyos lenne y(jω)-val. Ekkor m�d ny�lna y(jω) ill. y teljes � inform�ci�vesztes�g n�lk�li � rekonstrukci�j�ra. A
diszkr�t �s a folytonos idejű jel k�z�tt k�lcs�n�sen egy�rtelmű lenne
a kapcsolat.

6.22. �bra: A vissza�ll�tott jel spektruma ide�lis esetben.
Ebben az ide�lis esetben a teljes rekonstru�lhat�s�gnak a felt�teleit a Shannon f�le mintav�telez�si t�telek r�gz�tik.
Olyan mintav�telez�si frekvenci�t kell v�lasztani, amely az ωh hat�rfrekvencia k�tszeres�n�l nagyobb (Ω>2ωh), teh�t m�g a hat�rfrekvenci�s �sszetevőből is peri�dusk�nt kettőn�l t�bb mint�t kell venni (b �bra).
A vissza�ll�t�st olyan ide�lis alul�teresztő szűrő v�gzi, amely az ω<ωh s�vot Ts-szeres erős�t�ssel torz�tatlanul viszi �t, az Ω/2 feletti tartom�nyt pedig t�k�letesen szűri (c �bra). Ekkor az yd(jω)-b�l kiv�gott spektrum (y(0)=0) �ppen y(jω)-val egyezne.
A Shannon t�telek a val�s�gban elő nem �ll�that� elm�leti hat�reset megfogalmaz�sai. Egyr�szt hat�rfrekvenc�ja csak �lland�sult v�ges sz�m� harmonikus tagb�l �ll� jelnek van. Egyoldalas (valamikor bekapcsolt) jel frekvencia spektruma sohasem korl�toz�dik a v�ges frekvencia tartom�nyra. M�sr�szt az ide�lis alul�teresztő szűrő karakterisztika is csak megk�zel�thető. Ez�rt a mintav�telezett jel teljes hűs�ggel nem rekonstru�lhat�, az elszenvedett inform�ci�vesztes�g ann�l kisebb, min�l jelent�ktelenebb r�sze esik az y(jω) spektrumnak az ω>Ω/2 tartom�nyba.
6.6.3 Diszkr�t frekvencia �tviteli f�ggv�ny
A 6.6.2 pont eredm�nyeiből a diszkr�t frekvencia �tviteli f�ggv�nyre az al�bbi k�vetkeztet�sek vonhat�k le.
A wd(jω) frekvencia �tviteli f�ggv�ny egy
mintav�telezett jel � a diszkr�t s�lyf�ggv�ny � frekvencia spektruma, ez�rt a
frekvencia tartom�ny Ω
sz�less�gű s�vjaiban periodikusan ism�tlődik. A frekvencia diagramot
elegendő a ![]() fős�vban meghat�rozni.
fős�vban meghat�rozni.
A diszkr�t s�lyf�ggv�ny a tag diszkr�t idejű modellj�nek v�lasza egyetlen egys�gnyi ter�letű Dirac f�ggv�nyből �ll� bemenő impulzussorozatra. Ha a tag folytonos idejű, diszkr�t idejű modellje a tart�szervet is mag�ban foglalja.
P�ldak�ppen egy
folytonos idejű �tviteli f�ggv�nyű tag w folytonos idejű �s wd
diszkr�t idejű s�lyf�ggv�nyeit a 6.23 �br�n hasonl�tjuk �ssze. Dirac delta
bemenetre a folytonos idejű modell (a �bra) kimenő jele � a folytonos
idejű s�lyf�ggv�ny � w(0)=1/T1 kezdeti �rt�kből indul�, T1
idő�lland�val exponenci�lisan lecsengő g�rbe. Ennek mintav�telez�se
exponenci�lisan lecsengő g�rbe. Ennek mintav�telez�se exponenci�lisan
cs�kkenő ter�letű impulzusok ![]() sorozata lenne.
sorozata lenne.
A H z�rusrendű tart�szervvel kieg�sz�tett diszkr�t idejű
modellben (b �bra) a tart�szerv a bemenő Dirac impulzust egy Ts sz�less�gű
egys�gnyi amplit�d�j� n�gysz�g impulzuss� alak�tja, amelynek hat�s�ra a tag
kimenet�n wH folytonos idejű jel j�n l�tre. Ez 0-b�l indul (wH(0)=0), a t=Ts
időpontig az ![]() �rt�kig n�vekszik, majd a bemenő jel megsz�nt�vel T1 idő�lland�j� exponenci�lis
g�rbe szerint csillapodik.
�rt�kig n�vekszik, majd a bemenő jel megsz�nt�vel T1 idő�lland�j� exponenci�lis
g�rbe szerint csillapodik.
wH mintav�telezett alakja a wHd=wd diszkr�t idejű s�lyf�ggv�ny, ami
nem azonos a folytonos idejű s�lyf�ggv�ny ![]() mintav�telezett
form�j�val (Pl. wd(0)=0;
mintav�telezett
form�j�val (Pl. wd(0)=0; ![]() ).
).
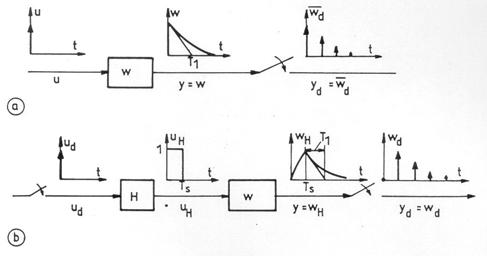
6.23. �bra: Folytonos idejű �s diszkr�t idejű s�lyf�ggv�nyek.
A 3.-b�l k�vetkezik, hogy a folytonos idejű tag wd(jω) diszkr�t frekvencia �tviteli f�ggv�nye, ha a fős�von bel�l az oldals�vok hat�sa elhanyagolhat�, nem a tag w(jω) folytonos frekvencia �tviteli f�ggv�ny�vel, hanem a wH(jω)�w(jω) f�ggv�nnyel ar�nyos, ahol wH(jω) a tart�szerv frekvencia �tviteli f�ggv�nye.
A diszkr�t frekvencia �tviteli f�ggv�ny kisfrekvenci�s helyettes�t�se
Ha felt�telezz�k, hogy a diszkr�t spektrumban az oldals�vok hat�sa a fős�vban elhanyagolhat� � ami helyesen kiv�lasztott mintav�telez�si l�p�sk�zn�l csaknem mindig megtehető � a diszkr�t frekvencia �tviteli f�ggv�ny az |ω|<1/Ts un. kisfrekvenci�s tartom�nyban a wd(jω) ~ wf(jω) folytonos �tviteli f�ggv�nnyel helyettes�thető, amelynek k�nnyen �ttekinthető a frekvencia menete, mert alkalmazhat�k r� az aszimptotikus k�zel�t�sek.
Ha ismerj�k annak a folytonos idejű tagnak a w(s) �tviteli f�ggv�ny�t, amelyből a wd(z) impulzus�tviteli f�ggv�ny sz�rmaztathat�, akkor a
6.6.3/4 pont szerint a helyettes�tő f�ggv�ny a wH(s)w(s) kisfrekvenci�s k�zel�t�se. Figyelembev�ve a
z�rusrendű tart� egyenlet�t, ![]() �s az
�s az ![]() �sszef�gg�st
�sszef�gg�st ![]() eset�n, s=jω r�vid�t�ssel:
eset�n, s=jω r�vid�t�ssel:
![]()
Az expon�lis f�ggv�nyt Taylor sor�nak első h�rom tagj�val helyettes�tve:

A kisfrekvenci�s tartom�nyban a diszkr�t idejű modell a folytonos
idejű modelltől egy Ts/2 holtidejű holtidős
taggal k�l�nb�zik. Ha w(s) nem
ismert, vagy wd(z) nem egy
folytonos idejű tag diszkr�t modellj�ből, hanem diszkr�t
műveletből � pl. a szab�lyoz�si algoritmusb�l � sz�rmazik, a wd(z) (6.24b) szerinti
alakj�ban a gy�kt�nyezőket egyenk�nt lehet kisfrekvenci�s k�zel�t�s�kkel
helyettes�teni. A (6.75b) kapcs�n k�zenfekvő az a felt�telez�s, hogy a
helyettes�t�s egy folytonos gy�kt�nyezőből, egy holtidő
jellegű időeltol�sb�l (f�ziseltol�sb�l) valamint egy olyan
ar�nyoss�gi t�nyezőből �ll, amely ω=0
(z=1) frekvenci�n az eredeti �s a k�zel�tő formul�t azonoss� teszi. Pontosabban
�gy fogalmazhatunk, hogy wd(z)
egy-egy gy�kt�nyezőj�t az s=0
pont k�r�li Taylor sor�val helyettes�tj�k. A Taylor sor a helyettes�t�s
pontoss�g�t�l f�ggő sz�m� s
v�ltoz�s gy�kt�nyező szorzatak�nt is elő�ll�that�. A legnagyobb
idő�lland�j� t�nyezőt kiemelve a t�bbit egyetlen holtidő
jellegű f�ziseltol�sba vonjuk �ssze (a holtidő itt �ltal�nos
�rtelemben pozit�v vagy negat�v ir�ny� időeltol�st is jelenthet). Legyen wd(z) valamelyik p�lusa vagy
z�rusa q, a megfelelő
gy�kt�nyező frekvencia �tviteli f�ggv�nye s=jω ill. ![]() r�vid�t�ssel
r�vid�t�ssel
![]()
A wq(s) kisfrekvenci�s k�zel�t�s az s=0 pont k�rnyezet�ben meg kell hogy egyezz�k a z=1 helyettes�t�ssel (vagy hat�r�tmenettel) kapott �rt�kkel.

6.2 �bra: Kisfrekvenci�s k�zel�t�s.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1190
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved