| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|
|
|
| ||||
LABORATORIUM PODSTAW MIERNICTWA |
|||||
|
Rok akademicki |
Rok studiów 2 |
Grupa 5 |
|||
Kierunek ELEKTROTECHNIKA |
Zespół b |
||||
|
Temat: Pomiary wielkości nieelektrycznych II – pomiary połosenia i prędkości. |
Nr ćwiczenia |
||||
I Program ćwiczenia:
Cyfrowy pomiar kąta obrotu za pomocą rastru w kodzie Gray’a – wyznaczanie błędów analogowych.
Pomiar połosenia kątowego przy wykorzystaniu potencjometru o liniowej charakterystyce.
Analogowy tor pomiaru prędkości – tachoprądnica DC, tachoprądnica synchroniczna.
II Opracowanie wyników:
Cyfrowy pomiar kąta obrotu za pomocą rastru w kodzie Gray’a – wyznaczanie błędów analogowych.
Tarcza z kodem Gray’a jest przezroczystą tarczą, która ma na swoim brzegu naniesiony ośmiościeskowy raster z kodem Gray’a. Linijka z 8 fotodetektorami odczytuje kątowe połosenie tarczy. Wielosyłowy kabel łączy fotodetektory z zespołem diod świecących LED, które wskazują czy fotodetektor jest oświetlony, czy zaciemniony. Sygnał z fotodetektorów przez układ komparatorów podawany jest do dekodera kodu Gray’a, który steruje wyświetlaczem cyfrowym. Na obudowie tarczy zamontowana jest skala z podziałką kątową z zakresu od 0 do 30 stopni z rozdzielczością 1 stopnia. Na ruchomej tarczy z kodem Gray’a umieszczono podziałkę noniusza o zakresie od 0 do 1 stopnia umosliwiającą pomiar kąta z rozdzielczością 0,05 stopnia. Układ ten umosliwia pomiar przemieszczenia kątowego z dusą rozdzielczością.
W celu wyznaczenia błędów analogowych cyfrowego pomiaru kąta połączono wyjście z impulsatora układu z tarczą w kodzie Gray’a, z dekoderem Gray’a. Następnie obracając korbką tarczy odczytano wartość kąta ze skali kątowej z noniuszem dla kolejnych wartości zmierzonych cyfrowo i odczytywanych z wyświetlacza dekodera. Pomiary wykonano przy zwiększaniu i zmniejszaniu wartości kąta w zakresie od 0 do 15 stopni.
Wyniki pomiaru przedstawia ponissza tabela:
|
Kąt z dekodera fD |
Kąt z podziałki fp |
Kąt z dekodera fD |
Kąt z podziałki fp |
Charakterystyka określająca wartość cyfrowego odczytu kąta obrotu od kąta obrotu zmierzonego przy pomocy skali kątowej z noniuszem przedstawia się następująco:

Na powysszej charakterystyce obserwowana jest histereza. Maksymalny błąd histerezy
DH = 1,1 [
Pomiar połosenia kątowego przy wykorzystaniu potencjometru o liniowej charakterystyce.
Pomiar połosenia kątowego został przeprowadzony na podstawie ponisszego schematu:
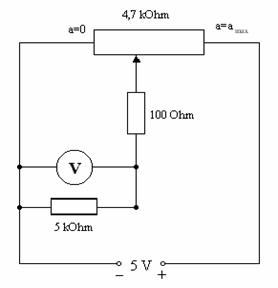
Potencjometr o rezystancji 4,7 [k] znajdujący się na wspólnej osi z tarczą w kodzie Gray’a został zasilony napięciem stałym o wartości 5 [V]. Napięcie mierzone multimetrem cyfrowym V560 pomiędzy stałym zaciskiem a suwakiem potencjometru odwzorowuje kąt obrotu. Opornik o rezystancji 100 [] włączony szeregowo z suwakiem zabezpiecza przed zniszczeniem potencjometru przy przypadkowym zwarciu styku suwaka z masą. Jako wzorcową miarę kąta obrotu przyjęto wartość odczytaną z wyświetlacza detektora kierunku ruchu impulsatora (dla pełnego obrotu impulsator generuje 1000 impulsów).
Wyznaczanie charakterystyki potencjometru:
|
Obrót j |
Napięcie U1 [V] |
Napięcie U2 [V] |
|
|
||
U1 – oznacza pomiar napięcia bez obciąsenia,
U2 – pomiar napięcia z obciąseniem.
Obciąseniem jest rezystor o wartości 5
[kW] włączony
pomiędzy suwakiem i końcem potencjometru.
Charakterystyki potencjometru przedstawiają się następująco:
Charakterystyka nr (1) przedstawia zalesność bez obciąsenia, nr (2) z obciąseniem.
Analogowy tor pomiaru prędkości – tachoprądnica DC, tachoprądnica synchroniczna.
Układ do pomiaru prędkości składa się z tarczy z otworkami i prądnicy DC na wspólnym wale, napędzanym przez pasek silniczkiem z generatorem synchronicznym równies na wspólnym wale. Wyprowadzenia układu pozwalają na obserwację sygnałów z prądnicy DC, oraz z fotodetektora i generatora synchronicznego. Silnik posiada dwa zaciski do zasilania napięciem regulowanym (do 12 [V]. Pomiar wartości skutecznej sinusoidalnego napięcia wyjściowego przeprowadzono woltomierzem V560 na zakresie zmiennoprądowym.
W celu wyznaczenia charakterystyki statycznej tachoprądnicy synchronicznej zaciski zasilania silniczka połączono z regulowanym źródłem napięcia z dekodera kierunku. Silniczek ten napędza układ złosony z prądnicy prądu stałego oraz tarczy z otworami. Układ fotodetektora zasilono napięciem 5 [V] z zasilacza KP 16102. Wyjście z generatora synchronicznego połączono z woltomierzem V560. Prędkość obrotowa mierzona była obrotomierzem cyfrowym NT1.
Wyniki dla tachoprądnicy synchronicznej zawiera tabela:
|
Obroty w prawo |
Obroty w lewo |
||
|
w [obr/min] |
U [V] |
w [obr/min] |
U [V] |
Aby wyznaczyć charakterystykę tachoprądnicy DC woltomierz przepięto na wyjście prądnicy DC. Pozostałe elementy układu zostały niezmienione.
Wyniki dla tachoprądnicy DC zawiera tabela:
|
Obroty w prawo |
Obroty w lewo |
||
|
w [obr/min] |
U [V] |
w [obr/min] |
U [V] |

Charakterystyki tachoprądnic
przedstawiają wykresy:
Prosta nr (1) przedstawia charakterystykę tachoprądnicy DC.
Prosta nr (2) charakterystykę tachoprądnicy synchronicznej.
III Wykaz wykorzystywanych przyrządów:
Zasilacz stabilizowany KP 16102.
Multimetr cyfrowy V560.
Obrotomierz cyfrowy NT1.
Zestaw silnik – impulsator – maszyna synchroniczna + DC.
Dekoder kodu Gray’a.
Układ współpracujący z impulsatorem – dekoder kierunku.
Zestaw tarcza z kodem Gray’a – potencjometr - impulsator.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 833
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved