| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
1 definirea caracteristicii de tracþiune
Calitãþile de tracþiune ºi economice ale tractorului pentru regimul nominal ºi, de asemenea, pentru toate regimurile diferite de acesta se determinã cu ajutorul caracteristicii de tracþiune. Caracteristica de tracþiune (sau diagrama de tracþiune) se construieºte în funcþie de forþa de tracþiune Ft, paralelã cu solul, (respectiv forþa motoare Fm), pentru cazul exploatãrii tractorului pe un teren orizontal, într-un regim stabilizat (v = const.). Ea cuprinde reprezentarea graficã a urmãtoarelor funcþii:
![]() - patinarea în
funcþie de forþa de tracþiune;
- patinarea în
funcþie de forþa de tracþiune;
![]() - viteza realã în
funcþie de forþa de tracþiune;
- viteza realã în
funcþie de forþa de tracþiune;
![]() - puterea de tracþiune
în funcþie de forþa de tracþiune;
- puterea de tracþiune
în funcþie de forþa de tracþiune;
![]() - consumul specific de
combustibil, raportat la puterea de tracþiune, în funcþie de forþa de
tracþiune.
- consumul specific de
combustibil, raportat la puterea de tracþiune, în funcþie de forþa de
tracþiune.
La
aceste curbe se mai adaugã, adesea, curba consumului orar de combustibil: ![]() . Cu excepþia patinãrii, toate celelalte mãrimi depind de
treapta de vitezã ºi, de aceea, curbele lor de variaþie se traseazã pentru
fiecare treaptã. Caracteristica de tracþiune depinde de tipul tractorului, de
parametrii lui constructivi ºi de exploatare ºi de felul terenului: beton, drum
de pãmânt, miriºte, ogor etc.
. Cu excepþia patinãrii, toate celelalte mãrimi depind de
treapta de vitezã ºi, de aceea, curbele lor de variaþie se traseazã pentru
fiecare treaptã. Caracteristica de tracþiune depinde de tipul tractorului, de
parametrii lui constructivi ºi de exploatare ºi de felul terenului: beton, drum
de pãmânt, miriºte, ogor etc.
De obicei, caracteristica de tracþiune se utilizeazã pentru ilustrarea rezultatelor încercãrilor efectuate în condiþii reale de drum sau de câmp, în care caz se numeºte caracteristicã de tracþiune experimentalã. Caracteristica de tracþiune construitã pe cale analiticã ºi grafo-analiticã se numeºte teoreticã.
În continuare, se prezintã metodica de obþinere a caracteristicii teoretice de tracþiune.
Pentru construcþia acestei caracteristici sunt necesare urmãtoarele date:
1) condiþii agrotehnice impuse tractorului: condiþiile de exploatare ale tractorului (drumurile ºi solurile tipice, caracteristicile lor fizico-mecanice), sistema de maºini ºi utilaje cu care va lucra (forþele lor de rezistenþã), gama vitezelor lente, de lucru ºi de transport, ponderea puterii transmisã prin priza de putere etc.;
2) date pentru calculul de tracþiune al tractorului ce se proiecteazã: greutatea tractorului (de exploatare ºi de aderenþã), tipul mecanismului de propulsie (pe roþi sau pe ºenile), raza roþilor motoare, numãrul ºi valoarea vitezelor teoretice de deplasare, randamentul ansamblurilor transmisiei;
3) caracteristica de regulator a motorului. În cazul montãrii pe tractorul ce se proiecteazã a unui motor nou, caracteristica lui se obþine prin metodele din teoria motoarelor, iar în cazul utilizãrii unui motor din producþia de serie, se foloseºte caracteristica acestuia obþinutã pe standul de probã;
4) caracteristica patinãrii sistemului de propulsie. Dacã existã prototipul tractorului ce se proiecteazã, din aceeaºi clasã de tracþiune cu un sistem de propulsie asemãnãtor ºi cu o greutate apropiatã, se utilizeazã curba patinãrii obþinutã prin încercãrile de tracþiune. Dacã însã la proiectare nu existã un tractor asemãnãtor, atunci curba patinãrii se obþine prin metode analitice.
2 MODELAREA MATEMATICÃ A CARACTERISTICII EXTERNE A MOTORULUI DE TRACTOR
Dacã existã caracteristica de turaþie (caracteristica externã) a motorului montat pe tractorul a cãrui caracteristicã de tracþiune se determinã, atunci prin diverse metode matematice (de exemplu, prin metoda Regresiei polinomiale din MathCAD) se obþine expresia analiticã a curbelor: Me = f(n) momentul efectiv, funcþie de turaþie; Pe = f(n) puterea efectivã, funcþie de turaþie; c = f(n) consumul specific de combustibil, funcþie de turaþie; C = f(n) consumul orar de combustibil, funcþie de turaþie. Dacã pentru motorul folosit nu sunt date experimentale, caracteristica acestuia se obþine pe cale analiticã, folosind una sau mai multe din metodele urmãtoare.
În lucrarea [5], pentru ridicarea caracteristicii de turaþie în coordonate relative (adimensionale) la motoare cu aprindere prin comprimare, se recomandã folosirea relaþiei urmãtoare:
 (1)
(1)
în care:
np
= nn este
turaþia puterii maxime Pe
max = Pn;
a, b, c - coeficienþi
care iau valorile din tabelul 1.
Tabelul 1
Valorile coeficienþilor din relaþia (1)
|
Tipul camerei de ardere |
a |
b |
c |
|
Camerã unitarã de ardere |
0,5 |
1,5 |
1,0 |
|
Camerã separatã de preardere |
0,7 |
1,3 |
1,0 |
|
Camerã separatã de vârtej |
0,6 |
1,4 |
1,2 |
Tabelul 2
Relaþii de calcul pentru puterea efectivã Pe
|
Tipul motorului |
Relaþia de calcul |
|
Cu aprindere prin scânteie |
|
|
Cu aprindere prin comprimare: cu injecþie directã |
|
|
cu antecamerã |
|
|
cu camerã de turbionare |
|
|
Pn - puterea nominalã; nn - turaþia nominalã; Pe ºi n - puterea efectivã ºi, respectiv, turaþia într-un anumit punct al caracteristicii. |
|
Relaþii de aceeaºi formã cu relaþia (1), însã cu alte valori ale coeficienþilor a, b, c sunt date în lucrãrile [1, 8], precum ºi în multe alte lucrãri, ºi sunt prezentate în tabelul 2.
În alte lucrãri, printre care [40], curba puterii este, de asemenea, aproximatã cu o parabolã de gradul trei:
 (2)
(2)
iar curba momentului efectiv de torsiune la arborele cotit se aproximeazã, în consecinþã, cu o parabolã de gradul doi:
 (3)
(3)
unde a1 a2 ºi a3 sunt astfel determinaþi, încât funcþiile de mai sus sã aproximeze cât mai bine caracteristica externã obþinutã pe cale experimentalã. Valorile acestor coeficienþi depind de coeficientul de elasticitate ce = nm nn ºi de adaptabilitate ca Mm Mn (unde nm este turaþia corespunzãtoare momentului maxim Mm ºi se pot obþine folosind relaþiile:

 (4)
(4)
Între
aceºti coeficienþi existã relaþia: ![]()
În lucrarea [41] sunt prezentate relaþii mai simple pentru coeficienþii a (în funcþie numai de coeficientul de elasticitate ce):

 (5)
(5)
Pe ramura de regulator a caracteristicii de turaþie a motorului, dependenþa Me = f(n) se considerã, în general, liniarã (dreaptã ce trece prin punctele de coordonate (nn, Mn) ºi (ng, 0)) ºi, prin urmare,
 (6)
(6)
în care:
ng este turaþia de mers în gol a motorului (turaþia
maximã a arborelui cotit),
ng = (1,06
1,1)nn;
nn - turaþia nominalã a motorului.
Pentru determinarea consumului specific de combustibil existã, de asemenea, numeroase expresii analitice. În lucrarea [2], de exemplu, în cazul funcþionãrii motorului pe ramura caracteristicii necontrolatã de regulator, se recomandã urmãtoarea relaþie:

care este echivalentã expresiei:
 (7)
(7)
unde cn este consumul specific de combustibil, corespunzãtor puterii nominale, în g/(kWh).
Pentru motoarele diesel cu injecþie directã, curba consumului specific de combustibil este descrisã mai precis de funcþia [1,8]:
 (8)
(8)
Consumul
specific de combustibil la regimul nominal poate fi determinat, în mod
aproximativ, cu relaþia  , în g/(kWh).
, în g/(kWh).
Pe ramura necontrolatã de regulator a caracteristicii de turaþie, consumul orar de combustibil, în kg/h, se determinã cu relaþia:
![]() (9)
(9)
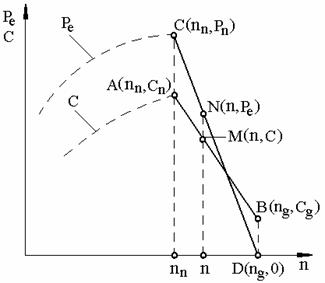
Fig. 1. Caracteristica de regulator a motorului.
Pe ramura de regulator a caracteristicii motorului, consumul orar de combustibil are o variaþie liniarã în funcþie de turaþie. Pentru a determina expresia analiticã a funcþiei C = f(n) se foloseºte figura 1. În acest scop, se scriu ecuaþiile dreptelor AB ºi CD:
Prin urmare,
Aplicând una din proprietãþile proporþiilor, se obþine:

de unde

Rezultã cã, pe ramura controlatã de regulator a caracteristicii motorului, consumul orar de combustibil se determinã cu relaþia:
 (10)
(10)
Pentru
un motor dat, ![]() ºi reprezintã coeficientul
unghiular al dreptei AB. Dacã
consumul orar
ºi reprezintã coeficientul
unghiular al dreptei AB. Dacã
consumul orar ![]() la mersul în gol al motorului nu se cunoaºte, se poate adopta
la mersul în gol al motorului nu se cunoaºte, se poate adopta
![]() [25], deci
[25], deci ![]() [kg/(kWh)], iar Cn/Pn = cn/1000.
[kg/(kWh)], iar Cn/Pn = cn/1000.
Consumul specific de combustibil, în g/(kWh), pe ramura de regulator se determinã cu relaþia:
![]() (11)
(11)
3 DETERMINAREA FORÞEI MOTOARE ªI A FORÞEI DE TRACÞIUNE
În cazul deplasãrii tractorului pe un teren orizontal, într-un regim stabilizat (v = const.), bilanþul de tracþiune al tractorului are urmãtoarea formã:
![]() (12)
(12)
de unde se obþine
![]()
în care:
K2 este coeficientul unghiular al dreptei Ft = f(Me),
 [m-1];
[m-1];
ω - viteza unghiularã a arborelui cotit, în s-1;
itr - raportul total de
transmitere al transmisiei;
htr - randamentul total al transmisiei;
vt - viteza teoreticã de deplasare a tractorului, în m/s;
Me - momentul efectiv al motorului, în Nm;
Rr = fG - rezistenþa
la rulare la deplasarea tractorului, în N.
Aºadar, forþa de tracþiune , la o treaptã oarecare j, se calculeazã cu relaþia:
 (13)
(13)
4 MODELAREA MATEMATICÃ A INTERACÞIUNII MECANISMULUI DE PROPULSIE CU SOLUL
Calitãþile de tracþiune ale tractoarelor sunt evaluate, mai ales, cu ajutorul valorii forþei tangenþiale de tracþiune. Aceastã forþã apare în procesul interacþiunii sistemului de rulare al tractorului cu solul (drumul) ºi depinde de foarte mulþi factori. De exemplu, în cazul tractoarelor pe roþi, depinde de: tipul tractorului (4×2 sau 4×4), greutatea aderentã, tipul pneurilor ºi parametrii acestora (diametrul, lãþimea, presiunea aerului din pneuri, înãlþimea pintenilor, pasul acestora, desenul anvelopelor), proprietãþile fizico-mecanice ale solului, patinarea sistemului de rulare cu solul.
Pentru determinarea analiticã a patinãrii tractoarelor pe roþi, s-au propus numeroase expresii. Gãsirea unui argument, în funcþie de care sã fie exprimatã patinarea, este o problemã dificilã, întrucât procesul interacþiunii sistemului de rulare cu solul este deosebit de complex. De aceea, în prezent, o importanþã considerabilã în studierea aderenþei, deci ºi a patinãrii, o au cercetãrile experimentale.
Mãrimea care caracterizeazã cel mai complet patinarea tractoarelor pe roþi este forþa motoare specificã, definitã prin raportul dintre forþa motoare Fm a tractorului ºi greutatea aderentã Ga:

în care:
lm este coeficientul greutãþii aderente (în calculul de tracþiune se adoptã lm = 0,8, pentru tractoare 4×2 ºi lm = 1, pentru tractoare 4×4
G - greutatea totalã a tractorului.
Între forþa motoare specificã ºi forþa de tracþiune specificã, jt = Ft / Ga , existã urmãtoarea dependenþã:
![]() sau
sau 
unde f este coeficientul de rezistenþã la rulare.
Mãrimea jm variazã de la jm = 0, când Fm = 0, pânã la jm max j, valoare corespunzãtoare patinãrii totale, d = 1, cunoscutã sub denumirea de coeficient de aderenþã.
Fãcându-se o sintezã a mai multor lucrãri teoretice ºi experimentale, în lucrarea [25] se propune ca la determinarea analiticã a patinãrii sã se plece de la urmãtoarea premisã (fig. 2):
în intervalul 0 £ jm£ 0,5j funcþia d = f(jm) are un pronunþat caracter liniar, având ecuaþia de forma d = mjm, m fiind coeficientul unghiular al dreptei;
în intervalul 0,5 < jm£ j funcþia d = f(jm), are un pronunþat caracter hiperbolic, având ecuaþia de forma d j jm) = const. (unde j este punctul de abscisã în care funcþia creºte asimptotic). În general, eroarea nu depãºeºte 2 4%, dacã se adoptã j j
Cu o precizie suficientã pentru practicã, se obþine o singurã funcþie d = f(jm pentru tot domeniul de variaþie a argumentului jm. Aceastã funcþie este de forma
 (14)
(14)
în
care: ![]()
![]()
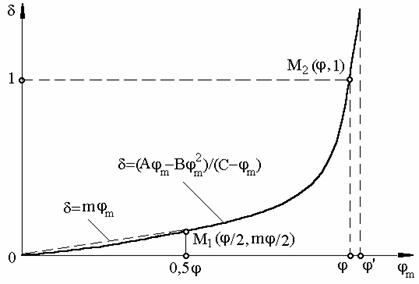
Fig. 2. Expresia analiticã a curbei patinãrii, pentru tractoarele pe roþi.
Formulele pentru coeficienþii A, B, D din relaþia (14) au fost obþinute punând condiþia ca funcþia cãutatã sã satisfacã simultan coordonatele punctelor M1 ºi M2 (v. fig. 2).
Aºadar, pentru exprimarea analiticã a patinãrii, este suficient sã se cunoascã coeficientul unghiular m al dreptei ºi coeficientul de aderenþã j, adicã argumentul jm corespunzãtor patinãrii totale. Relaþia menþionatã prezintã avantaje considerabile atunci când existã date experimentale referitoare la tractorul care se cerceteazã sau asupra unor tractoare apropiate acestuia.
Tabelul 3
Coeficienþii de rezistenþã la rulare ºi de aderenþã pentru tractoare pe roþi
|
Felul drumului sau solului |
Coeficientul de rezistenþã |
Coeficientul de aderenþã, j |
|
|
Suprafaþã |
Suprafaþã |
||
|
Drum: asfaltat betonat pavat de pãmânt, pe sol argilos de pãmânt, pe sol nisipos de zãpadã, bãtãtorit |
0,02 |
0,7 0,9 |
0,5 0,7 |
|
0,02 |
0,8 1,0 |
0,5 0,8 |
|
|
0,02 0,04 |
0,6 0,7 |
0,3 0,4 |
|
|
0,04 |
0,7 0,8 |
0,3 0,4 |
|
|
0,05 |
0,6 0,7 |
0,3 0,45 |
|
|
0,03 0,05 |
0,2 0,4 |
|
|
|
Fâneaþã: cositã necositã |
0,07 0,09 |
0,7 0,8 |
0,5 0,6 |
|
0,08 0,10 |
0,6 0,7 |
0,4 0,5 |
|
|
Þelinã (teren virgin), |
0,05 0,07 |
0,7 0,9 |
|
|
Pârloagã (de 2
3 ani), |
0,06 0,08 |
0,6 0,8 |
|
|
Miriºte dupã cereale pãioase |
0,08 0,10 |
0,6 0,85 |
0,5 |
|
Arãturã aºezatã |
0,12 0,14 |
0,4 0,6 |
|
|
Câmp: arat proaspãt prelucrat cu cultivatorul |
0,18 0,22 |
0,3 0,5 |
|
|
0,16 0,20 |
0,4 0,6 |
|
|
|
Nisip: umed uscat |
0,10 0,15 |
|
0,4 0,6 |
|
0,16 0,22 |
0,2 0,3 |
|
|
|
Mlaºtinã înierbatã |
0,20 0,25 |
|
0,2 0,25 |
|
Strat gros de zãpadã (0,4 m) |
0,18 0,20 |
|
0,2 0,25 |
Urmãtoarele funcþii exponenþiale, utilizate, mai ales, pentru tractoarele industriale, descriu, cu o precizie foarte bunã pentru practicã, patinarea tractoarelor pe roþi ºi pe ºenile:
- pentru tractoare pe roþi
 (15)
(15)
- pentru tractoare pe ºenile
 (16)
(16)
Pentru miriºte, rezultate foarte bune dã folosirea relaþiilor:
- pentru tractoare pe roþi
 (17)
(17)
unde ![]() , ceea ce corespunde patinãrii
, ceea ce corespunde patinãrii ![]()
- pentru tractoare pe ºenile
 (18)
(18)
unde ![]() , ceea ce corespunde, ca ºi în cazul tractoarelor pe roþi,
patinãrii 0£d£1
, ceea ce corespunde, ca ºi în cazul tractoarelor pe roþi,
patinãrii 0£d£1
Tabelul 4
Coeficienþii de
rezistenþã la rulare ºi de aderenþã pentru
tractoarele pe ºenile, valori medii
|
Felul drumului sau solului |
Coeficientul de rezistenþã |
Coeficientul de aderenþã, j |
|
Asfalt |
0,06 |
|
|
Drum bãtãtorit uscat de pãmânt nisipos |
0,06 |
1,1 |
|
Drum bãtãtorit uscat de cernoziom |
0,07 |
0,9 |
|
Drum bãtãtorit uscat de pãmânt argilos |
0,06 |
1,0 |
|
Fâneaþã umedã cositã |
0,08 |
1,2 |
|
Fâneaþã umedã necositã |
0,07 |
0,6 |
|
Þelina (teren virgin), pârloagã compactã |
0,07 |
1,1 |
|
Pârloagã (de 2 3 ani), pajiºte cositã |
0,07 |
1,0 |
|
Miriºte |
0,08 |
0,9 |
|
Arãturã aºezatã |
0,08 |
0,7 |
|
Arãturã proaspãtã |
0,10 0,12 |
0,6 |
|
Nisip umed |
0,10 |
0,5 |
|
Nisip uscat |
0,15 |
0,4 |
|
Mlaºtinã |
0,10 0,12 |
0,3 |
|
Drum de zãpadã bãtãtorit |
0,08 |
0,6 |
5 DETERMINAREA VITEZEI REALE DE DEPLASARE A TRACTORULUI
Viteza realã de deplasare a tractorului se calculeazã cu relaþia:
![]() (19)
(19)
în care:
vt este viteza teoreticã, ![]()
w - viteza unghiularã a arborelui cotit al
motorului, în s-1:
r - raza de rulare a roþii motoare, în m;
itr - raportul de transmitere al transmisiei la
o anumitã treaptã.
Dacã nu sunt alte valori mai exacte, atunci, la stabilirea datelor iniþiale de calcul, raza roþii motoare r, în m, poate fi determinatã cu relaþia lui Hedekel:
 (20)
(20)
în care:
r0
este raza liberã a roþii neîncãrcate (nici mãcar
cu greutatea proprie), în m;
Gm - sarcina verticalã pe roatã, în N;
pa - presiunea aerului în pneu, în Pa;
rb - raza secþiunii transversale a pneului, în
m (rb = 0,5B, adicã jumãtate
din lãþimea B a pneului).

Întrucât, adesea, când se efectueazã calculul de tracþiune nu se cunosc
rapoartele de transmitere ale transmisiei ºi nici raza roþilor (este cazul
etapei de proiectare), este recomandabil ca vitezele teoretice sã se calculeze
avându-se în vedere cã acestea depind liniar de turaþia arborelui cotit (fig. 3):
Fig.3. Graficul vitezei teoretice.

de unde rezultã

unde
![]() este coeficientul unghiular al dreptei (pentru o anumitã
treaptã de vitezã). Indicele n se referã la parametrii regimului
nominal.
este coeficientul unghiular al dreptei (pentru o anumitã
treaptã de vitezã). Indicele n se referã la parametrii regimului
nominal.
Prin urmare, viteza realã de deplasare a tractorului la treaptã oarecare j se determinã cu relaþia:
 (21)
(21)
6 DETERMINAREA PUTERII DE TRACÞIUNE
Puterea de tracþiune Pt, în kW, se determinã cu relaþia:
![]() (22)
(22)
în care:
Ft este forþa de tracþiune, în N;
v - viteza realã de deplasare a tractorului, în m/s.
7 Determinarea consumului specific de combustibil, raportat la puterea de tracþiune
Consumul specific de combustibil, raportat la puterea de tracþiune a tractorului, se determinã folosind relaþia sa de definiþie:
 [g/(kWh)]. (23)
[g/(kWh)]. (23)
8 DETERMINAREA PE CALE ANALITICÃ A RANDAMENTULUI DE TRACÞIUNE A TRACTORULUI
Randamentul de tracþiune al tractoarelor se determinã cu relaþia [25]:
 (24)
(24)
în care:
htr este randamentul total al transmisiei (în cazul tractoarelor pe ºenile include ºi randamentul hs = 0,95 0,97 al ramurilor motrice ale celor douã ºenile.
Rr - rezistenþa
la rulare a tractorului, Rr
= fG;
f - coeficientul de rezistenþã la rulare;
G - greutatea de exploatare a tractorului;
Fm - forþa tangenþialã de tracþiune
(forþa motoare), Fm = Ft
+ Rr.
Cu ajutorul relaþiei (24) se poate trasa curba randamentului de tracþiune în funcþie de forþa de tracþiune Ft, curbã ce reprezintã, de fapt, caracteristica potenþialã de tracþiune a tractorului. Aceastã caracteristicã evalueazã gradul de apropiere al unei caracteristici de tracþiune concrete faþã de una idealã.
Randamentul de tracþiune ht poate fi exprimat în funcþie numai de mãrimi adimensionale. Pentru aceasta ultima parantezã din relaþia (24), care reprezintã randamentul care evalueazã rezistenþa la rulare a tractorului, se scrie sub forma:

S-a exprimat greutatea de exploatare în funcþie de greutatea aderentã: G = Ga / lm ºi s-a folosit relaþia de definiþie a forþei de tracþiune specifice: jt = Ft / Ga. Prin urmare, relaþia (24) devine:
 (24)
(24)
9 ALEGEREA ªI DETERMINAREA VITEZELOR TRACTORULUI
În ultimele decenii, numãrul treptelor de vitezã ale tractoarelor, mai ales ale tractoarelor pe roþi, a crescut continuu, fiind uneori chiar mai mare de 40 de trepte. De exemplu, la tractoarele Fend Favorit 800, în gama de viteze 0,4 50 km/h, sunt 44 de trepte de vitezã pentru mers înainte ºi 44 pentru mersul înapoi. ªi la tractoarele pe ºenile, numãrul treptelor de vitezã a crescut continuu, însã într-o mãsurã mai micã. De exemplu, la tractorul pe ºenile Challanger (cu ºenile de cauciuc), în gama de viteze 0,25 30 km/h sunt 16+9 trepte.
În prezent, la tractoarele româneºti pe roþi se folosesc urmãtoarele numere de trepte de vitezã (mers înainte + mers înapoi): 6+2; 8+2; 10+2; 9+3; 12+3; 16+4.
Clasificarea treptelor de vitezã ale tractoarelor agricole,
dupã valoarea vitezei, în km/h
|
Felul treptei |
Tipul tractorului |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Pe roþi |
Pe ºenile |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Lente / superlente, tehnologice |
Pânã la 3,5 |
Pânã la 3,5 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
De rezervã |
3,5 7 |
3,5 5 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
De lucru |
7 12 sau 7 15 |
5 9 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
De transport |
12 50 sau 15 50 |
9 12 |
În tabelul 5 este datã clasificarea vitezelor tractoarelor dupã valoarea ºi utilizarea lor. Vitezele de lucru se folosesc la executarea principalelor lucrãri agricole: arat, semãnat, întreþinerea culturilor, recoltat etc. Se recomandã ca tractoarele pe roþi sã aibã în intervalul de viteze 4 12 km/h cel puþin 6 trepte. Vitezele de rezervã se utilizeazã temporar pentru învingerea unor forþe de rezistenþã care depãºesc (ocazional) cu mult valoarea rezistenþelor de lucru. Forþa de tracþiune la aceste viteze este limitatã de aderenþa tractorului cu solul. Vitezele lente (tehnologice) au valori limitate de condiþiile de lucru ºi nu de necesitatea obþinerii unor forþe mari de tracþiune; de regulã la aceste viteze, puterea motorului nu este folositã complet. Prin urmare, la aceste trepte motorul poate funcþiona la sarcini parþiale, cu o reducere a turaþiei de pânã la 40%. Aºadar, în acest caz, valoarea vitezei maxime la aceste trepte corespunde unei turaþii a motorului de 0,6nn (subliniem încã o datã: dacã aceste viteze sunt obþinute atât cu ajutorul transmisiei, cât ºi prin reducerea turaþiei motorului). Vitezele lente se folosesc când tractorul lucreazã în agregat cu maºini de plantat rãsaduri, de plantat puieþi (la împãduriri), la unele lucrãri de îmbunãtãþiri funciare etc. Vitezele de transport se folosesc pentru deplasarea în gol a tractorului sau pentru tractarea remorcilor ºi a semiremorcilor pe drumuri de pãmânt sau pe ºosele. Vitezele de deplasare ale tractorului depind de tipul tractorului, de felul lucrãrii, iar la alegerea lor trebuie sã se aibã în vedere ºi condiþiile agrotehnice. În tabelul 6 sunt date valorile vitezelor recomandate pentru diferite lucrãri agricole. În intervalul vitezelor (vmin vmax), vitezele intermediare, adicã structura vitezelor, se stabilesc prin mai multe metode: metoda progresiei geometrice, a progresiei aritmetice, a seriei armonice, a seriei economice, tratate pe larg în lucrarea [28]. Creºterea numãrului de trepte a determinat folosirea cutiilor de viteze compuse, iar aceasta a impus, la rândul sãu, folosirea, aproape în exclusivitate, a progresiei geometrice. Tabelul 6 Vitezele reale de deplasare pentru diferite lucrãri agricole
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 (25)
(25) (27)
(27) [N/kW], (29)
[N/kW], (29)
 (30)
(30)
 (31)
(31)
