| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Detectoare de tipul Weigh-In-Motion (VIM)
Sistemele Weigh-In-Motion folosite pentru autostrada sunt capabile sa estimeze greutatea bruta a vehiculului pe fiecare axa a acestuia , pe fiecare ansamblu de roti (jumatate de osie cu unul sau mai multe roti).Datele obtinute cu detectoarele WIM sunt folosite de catre proiectantii de drumuri, designeri, s.a.( departamentul de siguranta publica si politia de autostrada).
Aplicatii si utilizari
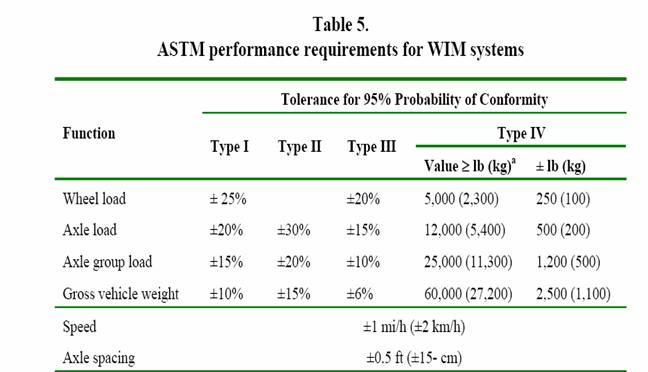
Sistemele de tipul WIM cresc capacitatea statiilor de cantarire si sunt deseori utilizate cand volumele de camioane grele nu pot fi acomodate in alt mod. Sistemele WIM ofera proiectantilor de autostrazi si designerilor timpul si datele volumului de trafic,viteza ,clasificarea vehiculelor in functie de numarul de osii, si incarcarea echivalenta pe osie importanta mai ales pentru vehiculele grele care traverseaza poduri .Datele despre incarcarea pe osie a camioanelor grele sunt utilizate de catre ofiterii unitatiilor de constrangere pentru planificarea activitatiilor de constrangere.In general software-ul este oferit in mod frecvent de catre producator pentru a ajuta la calibrarea sistemului si la analiza datelor.Categoriile de sisteme VIM sunt prezentate in tabelul 4 impreuna cu datele corespunzatoare pentru fiecare model (ASTM E1318-02,2002).Tabelul 5 ofera cerintele pentru functionarea optimala a sistemelor WIM dupa cum acestea sunt definite in ASTM (ASTM E1318-02, 2002).Unele state pot impune mai multe cerinte stricte ca acelea prezentate in tabelul 6.
Acuratetea sistemelor WIM depinde de 4 factori principali
●Dinamica vehiculelor
●Integritatea drumului ,compozitia si design-ul
●Varianta inerenta din sitemul WIM si
●Calibrarea
Dinamica vehiculelor depinde de rugozitatea suprafetei drumului, tipul suspensiei vehiculului, echilibrarea dinamica a vehiculului, greutatea vehiculului, viteza vehiculului,manevrele si maniera de conducere a soferului.Desi cele mai multe agenti incearca sa instaleze sistemele WIM in drumuri in stare buna , deteriorarile neasteptate sau anomaliile structurale apar uneori.De exemplu, masuratorile sistemelor WIM se inrautatesc cand drumurile (stratul superior) se inmoaie in perioada de vara cand temperaturile sunt ridicate si portiuni mari dealungul axei centrale se deplaseaza atunci cand un camion trece peste sfarsitul sectiunii.Varianta inerenta a sistemelor WIM difera in functie de tehnologia utilizata in sistem pentru masurarea greutatii pe osie.
Tabelul 4.
Categorii de siteme WIM, Aplicatii, si Date infromative
|
Categorii | ||||
|
Date |
Tipul I |
Tipul II |
Tipul III |
Tipul IV |
|
Intervalul de viteze |
16 pana la 130 km/h |
16 pana la 130 km/h |
16 pana la 130 km/h |
3 pana la 16 km/h |
|
Aplicatie |
colectare date trafic |
colectare date trafic |
constrangere greutate |
constrangere greutate |
|
Numarul de benzi |
1 sau mai multe |
1 sau mai multe |
1 sau mai multe |
1 sau mai multe |
|
Tabla incovoietoare |
● |
● |
● |
● |
|
Piezoelectric |
● |
● |
● |
● |
|
Celula de greutate |
● |
● |
● |
● |
|
Greutatea pe roti |
● |
● |
● |
|
|
Greutatea pe axe |
● |
● |
● |
● |
|
Greutatea pe grup de axe |
● |
● |
● |
● |
|
Greutatea bruta a vehiculului |
● |
● |
● |
● |
|
Viteza |
● |
● |
● |
● |
|
Distanta intre axe |
● |
● |
● |
● |
|
Categoria vehiculului ( dupa config axei) |
● |
● | ||
|
Cod de identificare al locului |
● |
● |
● |
● |
|
Banda si directia de deplasare |
● |
● |
● |
● |
|
Data si ora treceri |
● |
● |
● |
● |
|
Numarul de inregistrare al vehiculului |
● |
● |
● |
● |
|
Codul incalcat |
● |
● |
● |
● |
|
Acceleratia estimata |
● |
● |

Tabelul 7 ofera valori tipice ale variantei inerente foarte importanta pentru acuratetea sistemului ( pentru o deviatie de 1 a intervalului de incredere) de tipul piezoelectric, placa incovoietoare, si siteme cu o singura celulal de greutate.Tabelul arata ca este foarte comun ca un sistem WIM sa fie mai putin precis cand acesta cantareste grupuri individuale de axe in comparatie cu sistemul care masoara greutatea bruta a vehiculului.Efectul vitezei vehiculului asupra acuratetii totale a sistemului este ilustrat in tabelul 8.Factori de intrerupere sunt uneri programati in sistemele WIM pentru a ajuta la diferentierea masuratorilor de greutate a doua vehicule consecutive
|
Tehologia sistemelor WIM |
Grup de axe |
GVW |
|
Acuratetea WIM % |
Acuratetea WIM % |
|
|
Cablu piezoelectric | ||
|
Tabla incovoietoare | ||
|
1 Celula de greutate |
Tabelul 7 . Varaianta inerenta componeta a acuratetii sistemului
( intervalul de incredere a deviatiei standard 1)
Calibrarea asigura ca estimarea greutatii statice facuta de catre sistemele WIM sa aproximeze cat mai precis adevarata greutate statica.Calibrarea tine cont de efectele locale specifice cum ar fi temperatura drumului, viteza vehiculului, starea drumului.Procedura de calibrare poate include o faza de testare si o faza de reclaibrare.
Testele de acceptare a sistemelor WIM aplicate de Caltrans si raportate in State's Successful
Practices Weigh-in-Motion Handbook (McCall and Vodrazka, 1997) au trei etape: operatia de verificare a componentelor sistemului, procesul de calibrare intiala, si operatia de verificare continua timp de 72 ore.
Tabelul 8
Specificatii despre acuratete pentru tabla incovoietoare si celulele de greutate pe scara WIM
(intervalul de incredere pentru deviata standard 1)
|
Viteza |
Aplicatie |
Tipul incarcaturi |
Acuratetea tabla incovoietoare |
Acuratetea celula de greutate |
|
3.2 pana 16km/h |
Viteza mica /trecere lenta importanta pentru cantarire statica |
1 singura axa Axa tandem Greutate bruta |
3% of applied 3% of applied 2% of applied |
2% of applied 1.5% of applied 1% of applied |
|
18 pana la 40km/h |
Rampa de viteza mica |
1 singura axa Axa tandem Greutate bruta |
4% of applied 4% of applied 3% of applied |
4% of applied 3% of applied 2% of applied |
|
42 pana la 72km/h |
Rampa de viteza medie |
1 singura axa Axa tandem Greutate bruta |
6% of applied 6% of applied 4% of applied |
5% of applied 4% of applied 3% of applied |
|
Mai mare de 72km/h |
Rampa de viteza mare sau linie principala |
1 singura axa Axa tandem Greutate bruta |
8% of applied 8% of applied 5% of applied |
6% of applied 5% of applied 4% of applied |
●Testarea componentelor sistemului verifica transmiterea de semnale de la senzorul amplasat pe drum catre controlerul de la fata locului si conversia semnalului in date WIM dorite
●Calibrarea intiala consta in compararea datelor obtinute dupa trecerea a 2 sau mai multe camioane peste un senzor WIM cu masuratorile facute pe un cantar static.Mai multe treceri sunt facute pentru a masura greutatea si distanta dintre axe pe fiecare echipament de pe fiecare banda echipata cu senzor WIM la viteze care se incadreaza in intervalul operational.Aceste date sunt utilizate la calculul factorilor de greutate WIM care convertesc masuratorile dinamice in greutati statice.Vehiculele testate realizeaza treceri aditionale la fiecare viteza pentru a verifica valoarea factorilor.Factori de greutate pot fi adjustati pentru a tine cont de variatile sezoniere ,schimbarile conditiei drumului,si vehicule unice.
●Calibrarea de 72 h monitorizeaza operarea sistemului WIM pentru a asigura o functionare continua in cerintele specificate.Cand aceasta faza este completa ,sistemul este gata pentru a opera online.
Factorii de greutate sunt ajustati sau se realizeaza reparatii ale sistemului cand problemele sunt identificate in timpul reviziei ce are loc regulat.
Cele 4 tehnologii folosite de catre sistemele WIM pentru masuratori de greutate sunt Tabla incovoietoare,piezoelectric , celule de greutate si detectoarele capacitive.Fiecare dintre acestea sunt discutate in sectiunea urmatoare.
Tabla incovoietoare
Principiul de operare
Sistemele WiM tabla incovoietoare utilizeaza placi tensiometrice legate in partea de dedesubt.In momentul in care un vehicul trece peste tabla incovoietoare, dupa cum se prezinta in figura 11 , sistemul inregistreaza solicitarea (incovoierea) masurata de catre placa tensiometrica si calculeaza incarcatura dinamica.Greutatea statica este estimata utilizand masuratorile dinamice de greutate si parametrii de calibrare.Parametrii de calibrare depinde de factori cum ar fi viteza vehiculului , conditiile carosabilului , dinamica suspensiei, care influenteaza estimarea greutatii statice.
Acuratetea sistemelor WIM de tipul tabla incovoietoare poate fi exprimata ca functie de viteza cu care vehiculul traverseaza senzorii , presupunand ca sistemul este instalat intrun drum cu o structura sanatoasa si supus unpr conditii normale de trafic.Specificatiile de precizie mentionate in tabelul 8 se aplica sistemelor tabla incovoietoare produse de catre IRD. Ele se bazeaza pe o proba ce consta din 50 de vehicule incarcate la aproximativ 75% din limita admisa .Vehiculele traversand cantarul cu o variatie de mai mult de 10 % a vitezei,incarcatura de animale vi sau lichide nu a fost permisa pentru aceasta proba.
Figura 11 Senzor de tipul tabla incovoietoare
Sistemele WIM de tipul tabla incovoietoare contin fie unul sau doua cantare si doi detectori de tip bucla inductiva.O instalatie tipica tabla incovoietoare (sau celula de greutate)este ilustrata in figura 12. Cantarul este plasat pe banda de deplasare perpendicular pe directia de deplasare. Cand doua cantare sunt utilizate pe o banda , un cantar este plasat pentru fiecare pereche de roti in asa fel incat rotiile din partea dreapta si cele din partea stanga sa fie cantarite individual.Perechea de cantare este amplasata in banda in paralel sau la distanta de 5 m. Sistemele de tipul tabla incovoietoare cu cate un cantar pentru perechile de roti din partea stanga si partea dreapta sunt utilizate pentru benzi cu volume mici.Buclele inductive sunt plasate in amontele si avalul cantarelor. Buclele din amonte detecteaza vehiculele si atentioneaza sistemul de apropierea unui vehicul.Buclele din aval determina viteza vehiculului pe baza timpului necesar unui vehicul sa traverseze distanta dintre bucle.
Avantaje
Sistemele tabla incovoietoare pot fi utilizate atat pentru colectare de date de trafic cat si in scopul masurarii greutatii. Acuratetea acestor sisteme este mai mare decat a celor piezoelectrice si costurile lor sunt mai mici in comparatie cu cele ale sistemului de tip celula de greutate.Mentenata sistemelor WIM de tipul tabla incovoietoare nu necsita inlocuiri complete ale senzorilor ci doar renovarea dupa 5 ani.
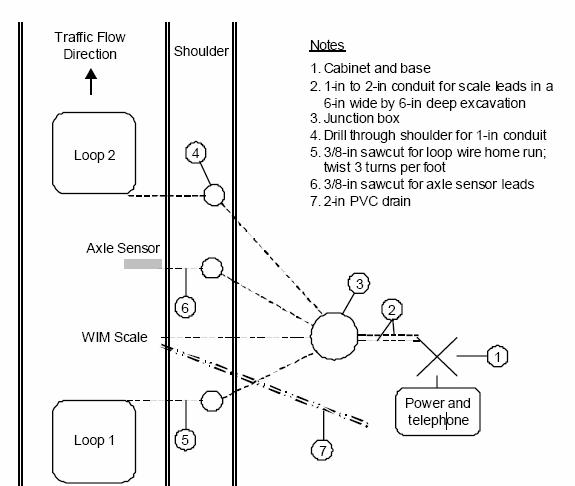
Figura 12 Sistem tabla incovoietoare sau celula de greutate.
Dezavantaje
Sistemele WIM de tipul tabla incovoietoare nu sunt la fel de precise precum sistemele celula de greutate si sunt considerate mai costisitoare decat cele piezoelectrice.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1038
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved