| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Procesul autopropulsarii automobilului
CALCULUL DE PROIECTARE
1. Calculul puterii la roata Pr
![]()
Se alege ![]() (1)
(1)
![]()
2 Calculul fortei la roata Fr
 (2)
(2)
3 Calculul mometului la roata Mr
 (3)
(3)
4 Calculul fortei de tractiune Ft
![]() (4)
(4)
5. Calculu rezistentelor ce apar la deplasarea automobilului
5.1. Calculul rezistentei de rulare Rr
![]()
Se alege: (5)
f=0,014
![]()
unde: n numarlu de persoane;
Gp greutatea unei pesoane;
Gb greutatea bagajelor;
![]()
5.2 Calculul rezistentei aerului Ra
 (6)
(6)
Se alege k=0,3Kg/m2
Ra se calculeaza pentru ![]()

5. Calculul rezistentei la panta Rp
![]() (7)
(7)
Se alege
panta ![]()
![]() la urcarea pantei
la urcarea pantei
![]() la coborarea pantei
la coborarea pantei
5.4. Calculul rezistentei la demaraj Rd
![]() (8)
(8)
5.5. Echilibrarea rotii motoare
 (9)
(9)
![]() (coeficientul de
rezistenta la rulare)
(coeficientul de
rezistenta la rulare)

Fig. 1. Fortele care actioneaza asupra rotii motoare.
![]()
unde: 
![]()
Puterea de rulare
![]()
![]() (10)
(10)
5.6. Echilibrarea rotii conduse.
Se bazeaza pe metoda izolarii corpurilor



Fig. 2. Fortele care actioneaza asupra rotii conduse
Rezestenta
la rulare a rotii conduse la citeza constanta este:![]()
6. Ecuatia generala de miscare. Bilantul de putere.
 (11)
(11)
6.1. Ecuatia de miscare a automobilului
![]() (12)
(12)
pentru panta:
 (13)
(13)
pentru deplasarea pe drum orizontal Ft=Fr-Rr
6.2. Ecuatia bilantului de putere.
![]() (14)
(14)
![]() (15)
(15)
pentru panta:
![]() (16)
(16)
pentru deplasarea pe drum orizontal:
![]() (17)
(17)
Am calculat Pr, Fr pentru deplasarea pe drum orizontal la viteza maxima constanta.
Deci ![]()

7. Calculul aderentei automobilului
7.1 Aderenta longitudinala
x este forta de aderenta
![]() (18)
(18)
 (19)
(19)
In cazul lipsei fortei de aderenta Xmin=0
![]() (20)
(20)
7.2. Aderenta transversala y
 (21)
(21)
La limita, cand ![]()
8. Calculul reactiunilor solului asupra rotilor automobilului
8.1. Calculul reactiunilor statice G1 si G2
 (22)
(22)
Se calculeaza coordonatele centrului de greutate: a, b si hg.
![]()
![]()
unde: G2 greutatea ce revine puntii din spate;
G1 greutatea ce revine puntii din fata;
L ampatamentul.
Din STAS se alege G1=55%Ga
G2=45%Ga
Deci
![]()
![]()

Se alege hg=0,68m=680mm, panta![]()

Pe drum orizontal(![]() )
)

8.2. Calculul reactiunilor dinamice Z1, Z2
![]() (23)
(23)
![]() (24)
(24)
Consideram ha=1000mm si calculam Z1, Z2 pentru viteza constanta a automobilului.
Se alege panta ![]()

Daca se neglijeaza Ra si automobilul se deplaseaza pe drum orizontal cu viteza constanta:

In cazul in
care se ia in considerare aderenta ![]()
 (25)
(25)
 (26)
(26)
Daca se neglijeaza
diferenta (ha-hg),precum si termenul ![]()
 (27)
(27)
![]() (28)
(28)
Se alege ![]() ; panta
; panta ![]()

8.3 Calculul coeficientilor masici m1 si m2
![]()


![]() (29)
(29)

9. Calculul capacitatii de tractiune al automobilului.
9.1. Caracteristica externa a motorului.
Reprezinta variatia momentului motor cu turatia la deschiderea copleta a clapetei de acceleratie in cazul M.A.S si la pozitia maxima a manetei de imbogatire (a pompei) in cazul M.A.C.
Pentru M.A.S. cu limitatorul de turatie sau M.A.C. cu regulator
Explicarea diagramelor:
1. La turatia minima de functionare stabila a motorului minim se dezvolta o putere P0 si un moment M0;
2.
La turatia de
moment maxim ![]() motorul dezvolta
momentul maxim Mmax si puterea corespunzatoare momentului
maxim PM;
motorul dezvolta
momentul maxim Mmax si puterea corespunzatoare momentului
maxim PM;
3. La turatia de putere maxima Np se dezvolta momentul motor Mp si puterea maxima Pmax;
4.
La turatia de
putere maxima ![]() se dezvolta
puterea Pm si momentul Mm.
se dezvolta
puterea Pm si momentul Mm.

Fig. Diagrama pentru M.A.S.
Functionarea stabila a motorului este intre ![]() si Np,
respectiv intre Nm si Nn.
si Np,
respectiv intre Nm si Nn.
Functinarea instabila este intre Nmin si Nm.
Portiunea din caracteristica exterioara cuprinsa intre Nr si Nmax poarta numele de caracteristica de regulator. Marimea zonei de stabilitate este caracterizata prin coeficientul de elasticitate:
![]() sau
sau ![]() (30)
(30)
Pentru M.A.S. Ce=0,450,64, pentru M.A.S. Ce=0,550,75.
Variatia momentului motor in zona de stabilitate este caracterizata prin coeficientul de adaptabilitate:
![]() sau
sau ![]() (31)
(31)
La M.A.S. Ca=1,11,3
La M.A.C. Ca=1,051,15

Fig. 4. Diagrama pentru M.A.S. cu limitator de turatie sau M.A.C. cu regulator
Pentru proiectarea motorului unui automobil se porneste de la relatia analitica de forma:
 (32)
(32)
unde: ![]()
![]() ;
;![]() (33)
(33)
9.2. Randamentul transmisiei.
![]() (34)
(34)
unde:
![]() este randamentul
transmisiei;
este randamentul
transmisiei;
Pr este puterea la roata;
P este puterea efectiva a motorului;
Ptr este puterea pierduta prin transmisie.
![]()
unde:
![]() - randamentul cutiei
de viteze;
- randamentul cutiei
de viteze;
![]() - randamentul cutiei
de distributie;
- randamentul cutiei
de distributie;
![]() - randamentul
transmisiei longitudinale;
- randamentul
transmisiei longitudinale;
![]() - randamentul
transmisiei principale.
- randamentul
transmisiei principale.
Randamentul transmisiei mecanice este mai nare decat randamentul transmisiei hidraulice sau al transmisiei electrice.
Valorile medii ale randamentului transmisie mecanice sunt:
![]()
pentru autoturisme se alege ![]() .
.
9.3 Determinarea caracteristici exterioare a motorului.
Daca se cunoaste turatia de putere maxima Mp, precum si puterea efectiva P, se poate determina caracteristica externa.
9.1. Determinarea caracteristicii exterioare a motorului prin calculul puterii la viteza maxima.
Puterea la viteza maxima Pvmax este dat de relatia:
![]() (35)
(35)

Putera maxima Pmax:
 (36)
(36)
Se alege pentru raportul ![]() valoarea 1,2
valoarea 1,2
![]()
Deci: ![]()
9.2. Dterminarea caracteristicii exterioare prin calculul puterii la viteza minima de deplasare pe panta maxima impusa.
![]() (37)
(37)
unde:
![]() (38)
(38)
este coeficientul rezistentei specifice a drumului V1min este viteza minima de deplasare
![]()
Se alege panta maxima ![]()

9.4. Determinarea raportului de transmitere a transmisiei principale i0
Prin raportul de transmitere de transmisie a transmisiei principale i0 se intelege raportul de demultiplicare a turatiei ce se obtine in afara cutiei de viteze si cutiei de distributie.
![]() (39)
(39)
![]() (40)
(40)

9.5. Determinarea raportului de transimitere in prima treapta a cutiei de viteze icv1.
![]()
![]() (41)
(41)
de unde:
![]()

9.6. Determinarea rapoartelor de transmisie in celelalte trepte ale cutiei de viteze.
9.6.1. Determinarea rapoartelor de tarnsmitere prin metoda grafo-analitica.
![]() (42)
(42)

Fig.5. Determinarea rapoartelor de transmitere prin metoda grafo-analitica.
Pe abscisa se reprezinta vitezele V[m/s] la o
scara arbitrara Kv=V/[V] unde [V] este segmentul de pe
desen corespunzator vitezei V1n,pe ordonata se
reprezinta vitezele unghiulare ![]() la o scra
arbitrara
la o scra
arbitrara ![]() , unde [
, unde [![]() ] este segmentul de pe desen corespunzator vitezei
unghiulare
] este segmentul de pe desen corespunzator vitezei
unghiulare ![]() .
.
Dreapta d1 se construieste unind originea
sistemului de axe 0 cu punctul a obtinut prein itersectia dreptei
orizontale de ordonata ![]() cu dreapta
verticala de abscisa V1min.
cu dreapta
verticala de abscisa V1min.
Dreapta d4 se traseaza unind originea
sistemului de axe 0 cu punctul d obtinut prin intersectia dreptei orizontale de ordonata ![]() sau
sau ![]() cu dreapta
verticala de abscisa Vmax.
cu dreapta
verticala de abscisa Vmax.
Graficul funtiei in treapta a doua, adica d2 reprezinta relatia:
![]() (43)
(43)
Pornind de la egalitatea V1max=V2min
si tinand seama ca V2min se obtine la viteza
unghiulara ![]() se coboara o
perpendiculara si se obtine punctul b la intersectia cu
se coboara o
perpendiculara si se obtine punctul b la intersectia cu ![]() . Unind originea sistemului de axe 0 cu punctul b si
prelungind pana in b se obtine graficul functiei in treapta a
doua. Pe cale grafo-analitica se deduce valoarea raportului de transmitere
in treapta a doua si anume:
. Unind originea sistemului de axe 0 cu punctul b si
prelungind pana in b se obtine graficul functiei in treapta a
doua. Pe cale grafo-analitica se deduce valoarea raportului de transmitere
in treapta a doua si anume:
![]() (44)
(44)
Graficul functiei in treapta a treia, adica dreapta d3 reprezinta relatia:
![]()
Analog se deduce valoarea raportului de transmitere in treapta a treia:
![]()
Stabilirea treptelor din cutia de viteze poate fi facuta in doua feluri:
1) Pornind de la raportul icv1 cunoscut,
construind punctul a si apoi punand conditia V1max=V2min
se obtin punctele b si b, rationamentele decurg la fel si
in celelalte trepte, pana la o treapta n la care Vnmax![]() Vmax
Vmax
2) Pornind de la ultima treapta, cu raportul de
transmitere unitar la care se realizeaza viteza maxima si
efectuand constructia in sens invers pana la obtinerea unui
punct a cu V![]() V1min.
V1min.
9.6.2. Determinarea rapoartelor de transmitere prin metoda analitica.
v1max=v2max
v2max=v3min
..
v(n-1)max=vnmax
 (45)
(45)
Daca se sorteaza ![]() , raportul denumit rotie, se poate scrie:
, raportul denumit rotie, se poate scrie:  (46)
(46)
Daca se considera ultima treapta a cutiei de viteze, treapta de priza directa (icvn-1), atunci:
qn-1=icvi sau ![]() (47)
(47)
Fiind determinat numarul de trepte si stiind ca icvn=1 se obtine raportul de transmitere intr-o treapta k:
![]() (48)
(48)
9.7. Caracteristica puterilor.
![]() (49)
(49)
Intervalul de putere utilizat la demarajul
automobilului este cuprins intre puterea Pwi corespunzatoare
vitezei unghiulare ![]() si puterea
corespunzatoare limitei maxime a intervalului.
si puterea
corespunzatoare limitei maxime a intervalului.
Deoarece functionarea motorului este
stabilita in intervalul ![]() , functioneaza intr-o treapta de viteze se
considera in intervalul PMPmax.
, functioneaza intr-o treapta de viteze se
considera in intervalul PMPmax.
Curba ![]() reprezinta suma
puterilor pentru deplasarea cu viteza constanta a automobilului pe o panta
inclinata cu unghiu
reprezinta suma
puterilor pentru deplasarea cu viteza constanta a automobilului pe o panta
inclinata cu unghiu ![]() si cu
coeficientul de rezistenta la rulare f.
si cu
coeficientul de rezistenta la rulare f.

Fig.6. Caracteristica puterilor.
Segmentul ab reprezinta puterea necesara invingerii rezistentei la rulare.
Segmentul bc reprezinta puterea necesara invingerii rezistentei la panta.
Segmentul cd reprezinta puterea necesara invingerii rezistentei aerului. Segmentul de reprezinta puterea disponibila la viteza V1 pentru accelerarea automobilului.
Daca :
![]() (4.50)
(4.50)
se scrie ecuatia bilatului de putere cu formula:
 (51)
(51)
La demaraj rationala devine schimbarea treptei a-3a cu a-4a cand viteza v2=v3max.
10. Performantele automobilului
10.1. Demarajul automobilului.
![]() (52)
(52)
10.1.1. Forta de rulare a rotii.
![]() (53)
(53)
![]() (54)
(54)
![]() (55)
(55)

Fig.7. Forta de rulare a rotii
10.1.2. Caracteristica dinamica a automobilului.
![]() (56)
(56)
D factorul dinamic
Se pot determina urnatoarele:
1) viteze maxima a automobilului
deci: ![]()
2) determinarea lui ![]()
3) panta maxima 
4) forta de aderenta ![]()

Fig.8. Caracteristica dinamica a automobilului
![]()
Daca se neglijeaza rezistenta aerului:
![]() (57)
(57)
10.1. Determinarea acceleratiei automobilului.
![]()
Daca  (58)
(58)
10.1.4. Determinarea timpului de demaraj.
![]()
 (59)
(59)
10.1.5. Determinarea spatiului de demaraj.
ds=vdt

![]() (60)
(60)
10.2. Franarea automobilului.
10.2.1. Echilibrarea rotii franate.

![]() (61)
(61)
Unde: Mf momentul de franare;
Ff forta de franare;
Ffr forta de franare la roata.

Tinand cont de aderenta Zr=7765,3 N
![]()

![]()
10.2.2. BilanTul fortelor care actioneaza asupra rotii franate

![]() (62)
(62)
10.2. Determinarea deceleratiei maxime.
![]()
![]() (63)
(63)
Daca franarea se face pe drum orizontal (![]() ) si daca se neglijeaza rezistenta
aerului, deceleratia maxima este:
) si daca se neglijeaza rezistenta
aerului, deceleratia maxima este:
![]()
In cazul franarii cu motorul decuplat (![]() ) deceleratia maxima devine:
) deceleratia maxima devine:
![]()
10.2.4. Determinarea spatiului minim de deceleratie

Daca viteza finala ![]() (motorul fiind
decuplat), atunci:
(motorul fiind
decuplat), atunci:
![]() (64)
(64)
Daca vi=54,38 m/s
![]()
10.2.5. Determinarea timpului minim de deceleratie.
 (65)
(65)
Daca: 
11. Consumul de combustibil al automobilului.
![]() (66)
(66)
Unde: Ce consumul specific;
Qh consumul orar;
P puterea efectiva a motorului.
![]() (67)
(67)
![]() (68)
(68)
![]() (69)
(69)
Unde: ![]() [Kg/dm3] este densitatea combustibilului.
[Kg/dm3] este densitatea combustibilului.
11.1. Caracteristica de consum a automobilului
Reprezinta dependenta grafica dintre
parametrul de consum ![]() sau
sau ![]() si viteza de
deplasare a automobilului pentru diferite valori ale rezistentei specifice
a drumului, corespund admisiei totale a combustibilului, la curbele 2,3,4,5,6
corespund admisiei partiale.
si viteza de
deplasare a automobilului pentru diferite valori ale rezistentei specifice
a drumului, corespund admisiei totale a combustibilului, la curbele 2,3,4,5,6
corespund admisiei partiale.
Valorile curbei puterii necesare invingerii rezistentei la inaintare se obtin cu relatia:
![]() (70)
(70)
11.2. Caracteristica economica a automobilului.
Ai limita de functionare normala a motorului.
Unde: 

Fig.9. Caracteristica de consum a automobilului.

Fig. 10 Carcteristica economica a automobilului
Abscisa punctelor B,C,D,E,F,G,H reprezinta viteza
maxima, caracteristica pentru fiecare ![]()
Curba AJ reprezinta consumul economic de combustibil.
12. Maniabilitatea si stabilitatea automobilului.
12.1 Maniabilitatea automobilului.
Este capacitatea automobilului de a mentine numai traiectoria ce i se imprima prin virare sau de a mentine mersul in linie dreapta.
12.1.1 Influentele virajului asupra maniabilitatii automobilului.

![]()
Unde b este distanta ditre pivotii fuzetelor.

Fig.11. Influenta virajului asupra maniabilitatii automobilului
![]() (71)
(71)
![]() (72)
(72)
12.1.2. Influenta elasticitatii rotii asupra maniabilitatii automobilului.
Fy este forta transversala ce provoaca deformarea laterala a noului.
Unghiul ![]() se numeste unghi
de deviere sau unghi de deriva.
se numeste unghi
de deviere sau unghi de deriva.
cand ![]() virarea este
normala;
virarea este
normala;
cand ![]() virarea este
insuficienta;
virarea este
insuficienta;
cand ![]() virarea este in exces.
virarea este in exces.
12.1. Influenta tractiunii asupra maniabilitatii automobilului.
Tractiune fata:
![]()
Unde: - F este forta de impingere
- Fx,Fy sunt componentele laterale.
Pentru a nu apare alunecari laterale al rotilor directoare:

Fig.12. Influenta elasticitatii rotii asupra maniabilitatii automobilului.
![]() (73)
(73)
Ftmax forta de tractiune maxima ce se poate obtine in limitele rularii fara alunecari laterale.
Fcy componenta transversala a fortei centrifuge.

Fig.1
Unghiul de deriva laterala ![]() .
.
12.2. Stabilitatea automobilului.
Este prorietatea automobilului, in mers, de a ramane permanent sprijinit pe toate rotile.
12.2.1. Stabilitatea longitudinala a automobilului.
Rasturnarea automobilului se poate produce cand:
![]()
In momentul rasturnarii:
Z1=0; ![]() ; Rd=0
; Rd=0![]()
![]()
![]() (74)
(74)
Desi conditia de stabilitate b rasturnarea pe panta longitudinala este:
![]() (75)
(75)
La derapaj, valoarea limita a unghiului pantei de la care are loc patinarea rotilor motoare este:
![]() (76)
(76)
Pentru ca patinarea sa aiba loc la un unghi de panta mai mic decat unghiul limita rasturnare trebuie indeplinita conditia.
![]()
sau
![]() (77)
(77)
La coborare coditia de stabilitate este:
![]() (78)
(78)
12.2.2. Stabilitatea transversala a automobilului.
12.2.2.1. Stabilitatea transversala la deplasarea rectilinie a automobilului.
La
rasturnare: ![]()
La drenaj: ![]()
12.2.2.2. Stabilitatea transversala in viraj.
Valoarea unghiului la care incepe rasturnarea este:

Unde R este raza de viraj.
Valoarea vitezei limita de rasturnare v2 a unui automobil care se deplaseaza in curba cu inclinare transversala este:
 [m/s] (79)
[m/s] (79)
Daca virajul are loc pe un drum plan (![]() ), viteza de rasturnare va fi:
), viteza de rasturnare va fi:

Valoarea unghiului la care incepe deplasarea este:
Viteza limita de deplasare a unui automobil care se deplaseaza pe un drem I, curba cu inclinare transversala este:
 (80)
(80)
La viraj pe un drum plan (![]() ), viteza limita de deplasare va fi:
), viteza limita de deplasare va fi:
![]() (81)
(81)
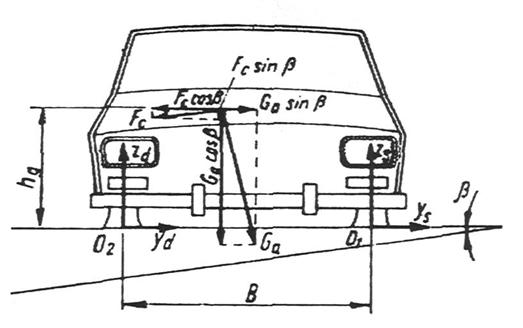
Fig. 14. Stabilitatea transversala in viraj.

Fig.15. Variatia coeficientului de aderenta.

Fig.16. Stabilitatea laterala a rotii.

Fig.17. Stabilitatea longitudinala a automobilului.

Fig.18. Schema de calcul static a reactiunilor G1 si G2.

Fig.19. Schema de calcul dinamic a reactiunilor G1 si G2.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 635
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved