| CATEGORII DOCUMENTE |
Interfete/cititoare pentru transmisia de date fara contact
1 Fluxul de date intr-o aplicatie
O aplicatie software care este desemnata sa citeasca sau sa scrie date de pe o purtatoare de date fara contact(transponder), necesita un cititor fara contact ca interfata.Din punctul de vedere al software-ului aplicatiei, accesul la datele purtatoarei ar trebui sa fie cat mai transparent.Cu alte cuvinte, operatia de scriere si citire trebuie sa difere cat mai putin de procesul accesarii comparabile a datelor purtatoarelor(smart card-uri cu contact, EEPROM serial) .
Operatiile de scriere si citire care implica o purtatoare de date fara contact sunt bazate pe principiul master-slave.(fig 1).Aceasta inseamna ca toate activitatile cititoarelor si transponderelor sunt initiate de aplicatia software.Intr-o structura cu sistem ierarhic aplicatia software reprezinta master-ul, in timp ce cititorul, ca slave, este numai activat cand comenzile scriere /citire sunt receptionate de la aplicatia software.
Pentru e executa o comanda de la aplicatia software, cititorul mai intai initiaza comunicatia cu un transponder.Acum cititorul joaca rolul de master in relatie cu transponderul.De aceea transponderul raspunde numai la comenzile cititorului si nu se activeaza niciodata independent.
O comanda simpla de citire de la aplicatia software catre cititor poate initia o serie de pasi de comunicatie intre cititor si un transponder.In exemplul din tabelul 11.1, o comanda de citire mai intai duce la activarea unui transponder, urmata de executarea unei secvente de autentificare si la final transmisia datelor cerute.
Functiile principale ale unui cititor sunt deci de activare a purtatoarei de date(transponderul), de a structura secventa de comunicatie cu purtatoarea de date, si transferul datelor intre aplicatia software si o purtatoare de date contactless.Toate caracteristicile comunicatiei fara contact, conectarea si procedurile anticoliziune si de autentificare, sunt controlate in intregime de cititor.
2 Componentele unui cititor
Un numar de proceduri pentru transmisia fara contact au fost deja descrise anterior.In ciuda diferentelor fundamentale ale tipurilor de cuplaj(inductiv-electromagnetic), a secventei de comunicatie, procedurii transmisiei de date de la transponder catre cititor(modulatia de sarcina, subarmonica) si ultimul dar nu cel din urma, domeniului de frecventa, toate cititoarele sunt similare in principiul lor de operare si deci in proiectare. Cititoarele in toate sistemele pot fi reduse la doua blocuri fundamentale: sistemul de control si interfata HF, constand dintr-un transmitator si un reciver(fig 2).Figura 3 prezinta un cititor pentru un sistem RFID cu culpaj inductiv.In partea dreapta se poate vedea interfata HF, care este ecranata impotriva emisiilor nedorite de o carcasi dintr-o placi de cositor.Sistemul de control este situat in partea stanga a cititorului si, in acest caz, contine un modul ASIC si microcontroler.Cu scopul de a fi integrat intr-o aplicatie software, acest cititor are o interfata RS 232 pentru a executa schimbul de date intre cititor (slave) si aplicatia software externa(master).
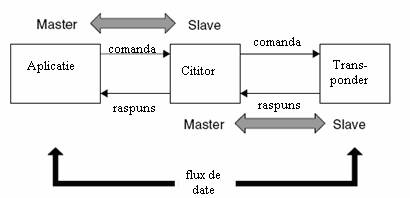
Fig.1 Primcipiul Master-Slave intre aplicatia software, cititor si transponder
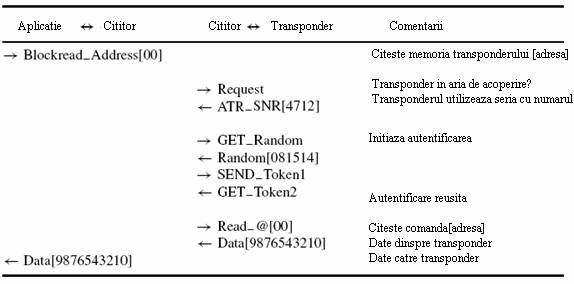
Tabel 1 Exemplu de executie a unei comenzi de citire a aplicatiei software, cititor si transponder
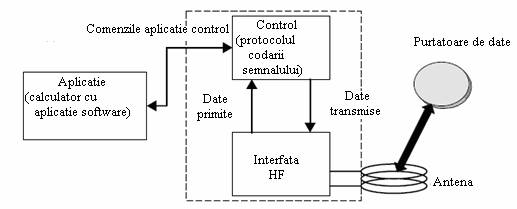
Fig 2 Diagrama bloc a unui cititor compus din sistem de control si interfata HF.Intregul sistem este controlat de o aplicatie externa prin intermediul comenzilor de control

Fig 3 Exemplu de cititor.Cele doua blocuri functionale, interfata HF si sistemul de control pot fi diferentiate clar.
2.1 Interfata HF
Interfata HF a cititorului executa urmatoarele functii:
Genereaza puterea frecventei inalta de transmisie pentru a activa transponderul si pentru a-l alimenta cu energie.
Modularea semnalului de transmisie pentru a trimite date transponderului
Receptia si demodularea semnalelor HF transmise de un transponder
Interfata HF contine cai separate de transmisie a semnalelor pentru a corespunde cu cele doua directii ale fluxului de date de la si spre transponder (fig 11.4)
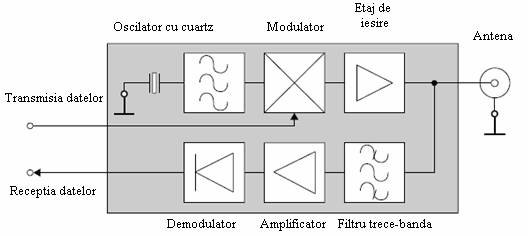
Fig 4 Diagrama bloc a unei interfete HF pentru un sistem RFID cu cuplaj inductiv
Datele transmise catre transponder trec prin ramura de transmisie.In mod invers, datele receptionate de la transponder sunt procesate prin bucla de receptie.
2.1.1 Sistem cu cuplaj inductiv,FDX/HDX
Mai intai, un semnal cu frecventa de functionare, 135kHz sau 13.56MHz, este generat prin bucla de transmisie de catre un oscilator cu cuartz de frecventa stabila.Pentru evitarea agravarii factorului de zgomot in raport cu nivelul slab al semnalului receptionat de la transponder, oscilatorul este o componenta pretentioasa si sensibila in ceea ce priveste stabilitatea de faza si zgomotul de banda de baza.
Senmalul oscilatorului este introdus intr-un modul de modulatie, controlat de semnalul in banda de baza al sistemului codarii semnalului.Acest semnal in banda de baza este acordat direct cu nivelul TTL, in care datele binare sunt reprezentate folosind un cod serial (Manchester, Miller, NRZ).In functie de tipul modulatorului, modulatia ASK sau PSK este realizata pe semnalul oscilatorului.
Modulatia FSK este de asemenea posibila, caz in care semnalul din banda de baza este introdus direct in sintetizatorul de frecventa.Semnalul modulat este adus apoi la nivelul cerut prin intermediul unui modul final de amplificare in putere si poate fi apoi transmis catre antena.Ramura de transmisie incepe de la antena, prima componenta fiind un filtru trece-banda sau opreste banda.In sisteme FDX/HDX acest filtru are sarcina de a bloca semnalul de putere prea mare de la modulul de iesire al trasnmitatorului si de a furmiza doar semnalul de raspuns de la transponder.In sisteme subarmonice, acesta este un proces simplu, deoarece frecventa de transmisie si receptie sunt de obicei o octava intreaga departate.In sisteme cu modulatia de sarcina care foloseste o subpurtatoare, sarcina de a construi un filtru potrivit nu trebuie subestimata pentru ca, in acest caz, semnalele transmise si receptionate sunt separate de frecventa subpurtatoarei.Valorile tipice ale frecventei subpurtatoarei in sistemele cu 13.56MHz sunt 847kHz sau 212kHz.Cateva sisteme LF cu modulatie de sarcina si fara subpurtatoare folosesc un filtru opreste-banda pentru a creste factorul de umplere(adancimea de modulare), prin reducerea semnalului propriei purtatoare.
O procedura diferita este redresarea si astfel demodularea modulatiei amplitudinii de sarcina direct la antena cititorului.Un exemplu de circuit pentru aceasta poate fi gasit in Sectiunea 3.
2.1.2 Sisteme cu microunde-semiduplex
Diferenta majora intre sistemele cu microunde si sistemele inductive de frecventa joasa (redusa) este frecventa de sintetizare:frecventa de operare, tipica de 2.45GHz, nu poate fi generata direct de oscilatorul cu cuartz, dar este creata prin multiplexarea (excitarea armonicilor) unui oscilator de frecventa joasa(redusa).Deoarece modulatia se opreste in timpul multiplicarii frecventei, modulatia se face la frecventa joasa(redusa), vezi fig 5.
Cateva sisteme cu microunde utilizeaza un cuplor directiv pentru a separa frecventa proprie trasmisiei de semnalul slab retrodifuzat al transponderului.
Un cuplor directiv(fig 6) consta din doua fire omogene continue cuplate.Daca toate cele 4 porturi se potrivesc si puterea P1 alimenteaza portul 1, atunci puterea este divizata intre porturile 2 si 3, fara ca portul 1 decuplat sa fie alimentat cu putere.
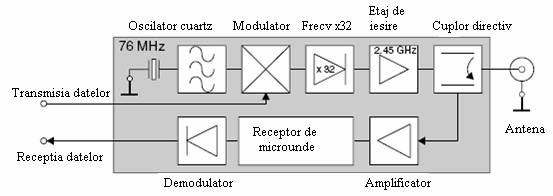
Fig 5 Diagrama bloc a unei interfete HF pentru sisteme cu microunde
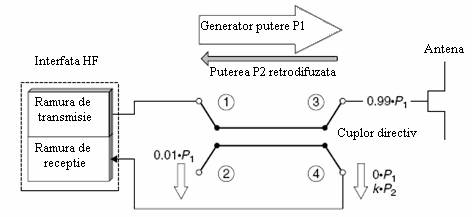
Fig 6 Dispunerea si principiul de operare a unui cuplor directiv pentru un sistem RFID cu retrodifuzie
La fel si in cazul cand este alimentat cu putere portul 3, caz in care puterea este divizata intre porturile 1 si 2.
Un cuplor directiv este descris prin pierderile de cuplaj:
![]()
si efectul directiv :
![]()
Efectul directiv este marimea logaritmica a raportului intre P4 si P2.
Un cuplor directiv pentru un cititor RFID cu retrodifuziune(imprastiere inapoi) ar trebui sa aibe efectul directiv maxim posibil pentru a minimiza semnalul decuplat al ramurei de transmisie la portul Pe de alta parte, pierderile de cuplaj ar trebui sa fie scazute pentru a decupla proportia maxima posibila a puterii reflectate P2 de la transponder catre ramura receptiei la portul
Un cititor utilizand decuplajul bazat pe un cuplor directiv cand este dat in functiune, este necesar sa se asigure ca antena transmitatorului este bine setata.
Puterea transmisa de la antena prin intermediul micilor ajustari este decuplata la portul 4 ca putere inversa.Daca cuplorul directiv are o pierdere de cuplaj buna, chiar o minima neconcordanta a transmisiei antenei(prin influentele mediului) este suficienta pentru cresterea puterii inverse la amplitudinea puterii reflectate a transponderului.Cu toate acestea, utilizarea unui cuplor directiv confera o imbunatatire semnificativa in comparatie cu nivelul coeficientului obtinut prin conectarea directa a modulului de iesire a transmitatorului cu intrarea receptorului.
2.1.3 Sisteme secventiale- SEQ
Intr-un sistem secvential RFID campul HF al cititorului este transmis pentru o perioada scurta de timp pentru a alimenta transponderul cu putere si/sau pentru a transmite comenzi transponderului. Transponderul isi transmite datele catre cititor in timp ce cititorul nu transmite. Transmitatorul si receptorul din cititor sunt deci active secvential, ca un walkie-talkie, ce de asemenea transmite si receptioneaza alternativ(vezi fig 11.7).Cititorul contine o unitate de comutare instantanee pentru a comuta intre modul de transmisie si receptie.Aceasta functie este normal realizata de diodele PIN in tehnologia radio.Intr-un sistem SEQ nu sunt cerinte speciale pentru un receptor.Pentru ca semnalul de putere mare al transmitatorului nu este prezent pentru a cauza interferente in timpul receptiei, receptorul SEQ poate fi conceput pentru sensibilitate maxima.Aceasta inseamni ca aria de acoperire a sistemului poate fi marita pentru a corespunde cu aria de energie, adica distanta intre un cititor si transponder la care exista suficienta energie pentru ca transponderul sa efectueze operatii.
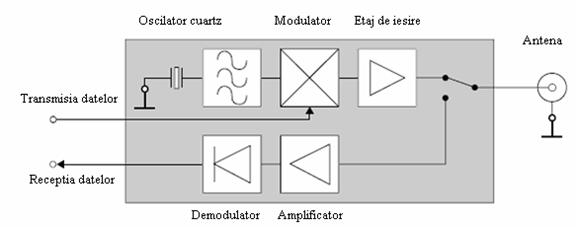
Fig 7 Interfata HF al unui cititor pentru sistem secvential
2.1.4 Sistem cu microunde pentru transpondere SAW
Un puls electromagnetic scurt transmis de antena cititorului este receptat de antena suprafetei de unda a transponderului si convertit intr-o unda plana intr-un cristal piezoelectric.
Un aranjament caracteristic al structurilor partial reflective in calea de propagare a undei plane determina aparitia mai multor pulsuri, care sunt transmise inapoi de antena transponderului ca un semnal de raspuns.
Datorita timpilor decalati de propagare in cristalul piezoelectric semnalul codat reflectat de transponder poate fi usor separat in cititor de toate celelalte reflexii electromagnetice din vecinatatea cititorului.Diagrama bloc a unui cititor pentru suprafata de unda a transponderelor e prezentata in figura 8 .
Un oscilator de frecventa si faza stabila cu o suprafata de unda rezonanta este folosit ca sursa de inalta frecventa.Folosind un comutator rapid HF, impulsuri HF scurte de durata aproximativ 80ns, sunt generate din semnalul oscilatorului, care sunt amplificate in jurul a 36dBm(4 W la varf) de catre etajul de amplificare la iesire, si transmis de antena cititorului.Daca un transponder SAW este localizat in vecinatatea cititorului, el reflecta o secventa de pulsuri individuale dupa un timp de intarziere de cateva microsecunde.
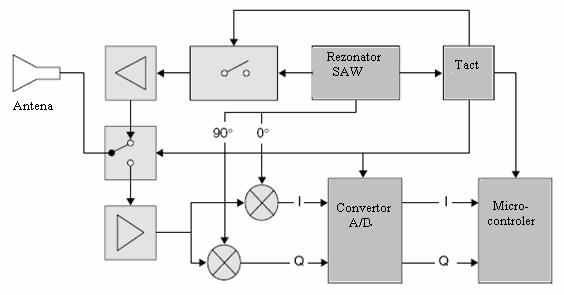
Fig 8 Diagrama bloc pentru un cititor pentru suprafata de unda a unui transponder
Pulsurile receptate de antena cititorului trec printr-un amplificator cu zgomot redus si apoi sunt demodulate intr-un demodulator in cuadratura.Aceasta determina doua componente ortogonale care faciliteaza determinarea unghiului de faza intre impulsurile individuale si intre impulsuri si oscilator.Informatia obtinuta poate fi utilizata pentru a determina distanta sau viteza intre transponderul SAW si cititor.
Pentru a fi mai precis, circuitul cititorului din figura 11.8 corespunde cu un radar de impulsuri, ca cele folosite in navigarea aeriana(desi in aceasta aplicatie puterea e mult mai mare).
2.2 Unitatea de control
Unitatea de control a cititorului(fig 9) executa urmatoarele functii:
In sisteme mai complexe sunt valabile urmatoarele functii aditionale:
Unitatea de control este bazata pe un microprocesor pentru a realiza aceste functii complexe.Procedurile criptografice, cum ar fi cifrarea(codarea) sirului intre transponder si cititor, si de asemenea codarea semnalului, sunt adesea realizate intr-un modul ASIC aditional pentru a suplini activitatea microprocesorului in procese de calcul intensive.Din motive de performanta ale modului ASIC este accesat prin intermediul magistralei microprocesorului.
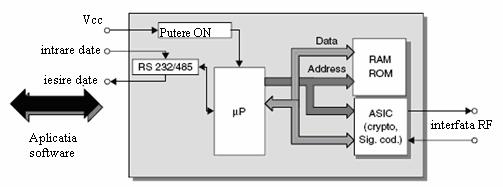
Fig 9 Diagrama bloc a unitatii de control a unui cititor.Comunicatia cu o aplicatie software superioara e realizata prin intermediul unei interfete seriale
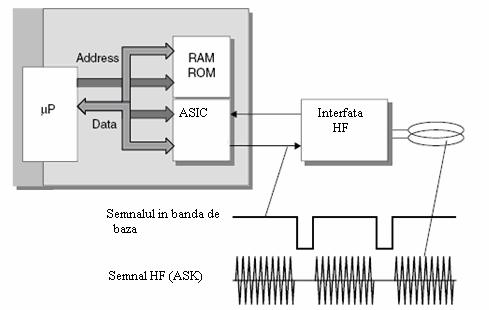
Fig 10 Codarea si decodarea semnalului este realizata tot de unitatea de control din cititor
Schimbul de date intre aplicatia software si unitatea de control este realizata prin intermediul unei interfete RS232 sau RS485.Este utilizata codarea NRZ(8 biti asincron).Rata de baud este in mod normal multipla cu 1200Bd(4800Bd, 9600Bd etc).
Interfata intre unitatea de control si interfata HF reprezinta starea interfetei HF ca un numar binar.In sistemele modulate ASK, '1'logic(la intrarea modulatiei) reprezinta starea 'semnal HF on', '0' logic reprezentand starea 'semnal HF off'.
3 Modele de cititoare
Diferite tipuri si modele de cititoare sunt disponibile pentru aplicatii diferite.Cititoarele pot fi clasificate in general in citioare OEM, cititoare portabile sau de uz industrial si numeroare modele speciale.
3.1 Cititoare OEM
Cititoare OEM sunt disponibile pentru integrarea datelor aplicatiilor sistemelor proprii ale clientilor, terminale BDE, sisteme de control al accesului, roboti, etc.Acest tip de cititoare sunt livrate intr-o carcasa de cositor pentru ecranare sau lipsit de carcasa.Conexiunile electrice sunt in forma imbinarii, vezi figura 11
3.2 Cititoare pentru uz industrial
Cititoare cu uz industrial sunt disponibile in fabrici industriale si de asamblat.Acestea au de obicei o interfata cu o magistrala standardizata pentru integrarea mai usoara in sisteme deja existente.Ca utilizare aditionala, aceste cititoare acopera tipuri variate de protectie si sunt disponibile si cititoare protejate impotriva exploziilor.
3.3 Cititoare portabile
Acestea sunt utilizate in identificarea animalelor, ca dispozitiv de control in transportul public, ca terminal pentru plati electronice, si ca ajutor in servirea, testarea si in comisionarea sistemelor.Un cititor portabil contine un display LCD si o tastatura pentru operatii sau introducerea de date.O interfata optionala RS232 este de obicei prevazuta pentru schimbul de date intre cititoarele portabile si un PC.

|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2774
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved