| CATEGORII DOCUMENTE |
SISTEME DE REGLARE AUTOMATA
- Schema de principiu
- Marimile care intervin in schema de principiu a unui sistem de reglare automata
- Clasificarea SRA
SISTEME DE AUTOMATIZARE
Sistemul este un model fizic realizabil al unui ansamblu de obiecte naturale sau create artificial in care unele marimi reprezinta cauza, iar altele efectul.
Fig. 1.1. Schema functionala a unui sistem
S - sistem;
U(t) - marime de intrare (cauze);
Y(t) - marime de iesire (efecte).
Sistemul automat reprezinta reuniunea a doua subsisteme: dispozitivul de automatizare (D.A.), care stabileste legea sau algoritmul de conducere a procesului, dupa un program prestabilit si instalatia tehnologica (I.T.) sau procesul automatizat
Fig. 1.2. Modelul structural al unui sistem de reglare automata
Marimile care intervin in cadrul unui sistem automat inchis sunt:
r - marimea de referinta sau programul prescris sistemului;
U - marimea de comanda sau de conducere a procesului;
Y - marimea de iesire (marime reglata);
Yr - marimea de reactie inversa;
P - marimea perturbatoare.
Intr-un sistem de automatizare cu circuit inchis, esential este prezenta reactiei principale (legatura inversa) dintre procesul automatizat si dispozitivul de automatizare. reactia aduce permanent informatia la dispozitivul de automatizare a valorii marimii de iesire.
Sistemul in ansamblu, nu poate realiza corelatia dorita r→ y daca nu exista informatii pe baza carora dispozitivul de automatizare sa ia decizii, ca urmare a prezentei marimilor perturbatoare P. Acestea din urma se datoreaza:
- sarcinilor variabile cu care lucreaza procesul automatizat;
- influientei factorilor externi asupra elementelor;
- variatiei parametrilor mediului ambiant;
- uzurii si procesului de imbatranire a elementelor.
SISTEME DE REGLARE AUTOMATA
Reglarea este un proces prin care o marime fizica este mentinuta sau i se modifica valoarea prescrisa conform cerintelor procesului industrial in care se doreste acest lucru.
Marimea care este supusa reglarii intr-o valoare prescrisa este cunoscuta sub denumirea de marime reglata.
Daca reglarea se face de catre un operator, in urma verificarilor parametrilor ei cu ajutorul aparatelor de masurat, se spune ca reglarea este manuala. Daca se foloseste un dispozitiv automat, numit regulator, atunci reglarea este automata. Operatorul este inlocuit de catre dispozitivul automat, cel care inlocuieste toate operatiile pe care le facea omul.
Indiferent de marimea reglata, in procesul de reglare apar influiente care modifica marimea de executie. Aceste influiente se datoreaza perturbatiilor ce pot aparea in timpul reglarii. Pentru orice modalitate de reglare se va stabili:
Ø Care este marimea reglata;
Ø Care este marimea de executie cea mai potrivita;
Ø Ce marimi perturbatoare intervin;
Ø Cum intervin marimile perturbatoare in procesul de reglare;
Ø Cum se manifesta marimea perturbatoare in timpul procesului de reglare.
Reglarea automata este un proces, indeplinit automat, prin care o marime fizica este fie mentinuta la o valoare prescrisa constanta (numita consemn), fie isi modifica valoarea la intervale de timp date, conform unui anumit program, luand astfel o succesiune de valori prescrise.
Prin Sistem de Reglare Automata (SRA) se intelege un sistem realizat astfel incat corespondenta intre marimea de iesire si marimea de intrare se realizeaza automat, fara interventia omului, o relatie functionala care reflecta legea de conducere a unui proces.
Elementele unui sistem de reglare automata sunt:
- DA - dispozitivul de automatizare, numit si dispozitiv de reglare automata, care trebuie sa stabileasca o corespondenta dupa o relatie data (de obicei de proportionalitate) intre marimea de iesire Xe si marimea de intrare Xi. Deci, prin marimea de intrare se impune o lege de variatie pentru marimea de iesire. Dispozitivul de reglare automata mai primeste si valoarea reala a marimii de iesire Xe. El compara cele doua marimi si stabileste o lege de comanda, actionand prin marimea de executie Xm asupra instalatiei automatizate, in vederea aducerii marimii de reglare Xe la valoarea prescrisa.
- IA - instalatia automatizata, este instalatia tehnologica privita ca obiect al automatizarii, care poate fi prezentata ca un subsistem supus unor actiuni externe, denumite perturbatii.
Pentru a studia modul cum se realizeaza reglarea automata se apeleaza la schema bloc (scheme functionale), scheme in care sunt indicate elementele componente ale sistem de reglare automata (prescurtat SRA), destinatia lor si legaturile functionale intre ele.
Fig. 3 Modelul structural al unui sistem de reglare automata (SRA)
Schema bloc a SRA este o reprezentare conventionala grafica a sistemului automat in care se indica elementele componente, legaturile dintre acestea si marimile care se transmit prin aceste legaturi, precum si sensul de transmitere a acestora.
Elementele componente ale eschemei unui SRA:
E.C. - element de comparatie - are rolul de a compara permanent marimea de iesire a instalatiei tehnologice cu o marime de acelasi fel cu valoare prescrisa (considerata constanta), rezultatul comparatiei fiind semnalul de eroare ε;
R.A. - regulator automat - are rolul de a efectua anumite operatii asupra marimii ε primita la intrare, respectiv are rolul de a prelucra aceasta marime dupa o anumita lege, numita lege de reglare, rezultatul fiind marimea Xc aplicata ca marime de comanda elementului de executie;
E.E. - element de executie - are rolul de a interveni in functionarea instalatiei tehnologice pentru corectarea parametrilor reglati conform marimii de comanda transmise de RA;
I.A. - instalatie automatizata (tehnologica) - este in cazul general un sistem supus unor actiuni externe numite perturbatii si actiunii comenzii generate de RA a carui marime de iesire este astfel reglata conform unui program prescris;
Tr - traductor de reactie - este instalat pe bucla de reactie negativa are rolul de a transforma marimea de iesire a IT de regula intr-un semnal electric aplicat EC.
Marimi care intervin in schema de elemente a unui SRA:
U (Xi) - marime de intrare a sistemului;
ε (Xa) - semnalul de eroare (marime de actionare);
Xa=Xi-Xr
Yr (Xr) - marime de reactie;
Xc - marimea de comanda;
Xm- marime de executie;
Y (Xe)- marime de iesire a sistemului (a instalatiei tehnologice);
P (Xp) - perturbari (marimi perturbatoare).
Functionarea SRA:
Valoarea prescrisa (dorita) a marimii de iesire Xe se impune prin marimea de intrare Xi. ea se poate modifica printr-o actiune asupra elementului de intrare EI, data de un operator uman sau de un dispozitiv tehnic. Elementul de comparatie EC compara marimea de intrare cu marimea de reactie, dand marimea de actionare Xa=Xi-Xr
Deoarece marimile Xi si Xr sunt proportionale cu valoarea prescrisa, respectiv cu valoarea reala a marimii de iesire, rezulta ca marimea de actionare Xa este proportionala cu abaterea marimii de iesire de la valoarea prescrisa. In functie de aceasta marime de actionare, regulatorul RA stabileste o lege de comanda, in vederea aducerii marimii de iesire la valoarea prescrisa, adica pentru anularea erorii de reglare. Regulatorul automat este dispozitivul tehnic care inlocuieste functiile operatorului uman intr-un proces de reglare manuala.
Daca datorita actiunii marimii perturbatoare, Xp, marimea de iesire, Xe, scade fata de valoarea prescrisa, scade in mod corespunzator si marimea de reactie Xr, iar marimea de actionare Xa, va creste; regulatorul automat RA va stabili o comanda Xc, care, aplicata instalatiei automatizate IA, prin elementul de executie EE, produce modificarea marimii de iesire Xe in sensul revenirii acesteia la valoarea prescrisa.
O asemenea functionare este posibila numai datorita faptului ca sistemul este in circuit inchis, pe langa legatura directa, de la intrarea la iesirea sistemului, exista o legatura inversa, numita legatura de reactie, prin care se controleaza daca obiectivul reglarii este indeplinit. Un asemenea sistem in circuit inchis se numeste bucla de reglare.
Clasificarea SRA
Dupa dependentele - in regim stationar - dintre marimile de iesire si de intrare ale elementelor componente
SRA liniare (cand dependentele sunt liniare)
SRA neliniare (cand cel putin una din dependente este neliniara). Din punct de vedere matematic sistemele liniare sunt descrise prin ecuatii liniare, iar cele neliniare prin ecuatii neliniare.
Dupa caracterul prelucrarii semnalelor (actiune regulatorului automat)
SRA cu actiune contina (cand toate marimile care intervin sunt continue in timp)
SRA cu actiune discontinua (discreta) - (cand cel putin una dintre marimi are o variatie discreta in timp).
Dupa scopul reglarii
Sisteme de stabilizare automata - marimea de intrare este constanta
SRA cu reglare automata cu program variabil - marimea de intrare variaza dupa un anumit program
Sisteme de urmarire - marimea de intrare variaza aleatoriu in timp
Dupa numarul de bucle principale (de reactie)
sisteme cu o bucla de reglare
sisteme cu mai multe bucle de reglare
Dupa viteza de raspuns a IT la un semnal aplicat la intrare
SRA pentru procese rapide, cand constantele de timp ale IT nu depasesc 10 secunde (actionarile electrice)
SRA pentru procese lente
Dupa numarul marimilor de iesire
SRA cu o singura marime reglata (monovariabile, simple)
SRA cu mai multe marimi reglate (multivariabile)
Dupa modul de variatie a marimilor din sistem
SRA continue
SRA discontinue (discrete)
Dupa agentul purtator de semnal
SRA electronice
SRA pneumatice
SRA hidraulice
SRA mixte
Dupa caracteristicile constructiei dispozitivelor de automatizare
SRA unificate (cand toate marimile care circula sunt unificate, adica au aceeasi gama si aceeasi natura)
SRA specializate, cand nu se intampla acest lucru.
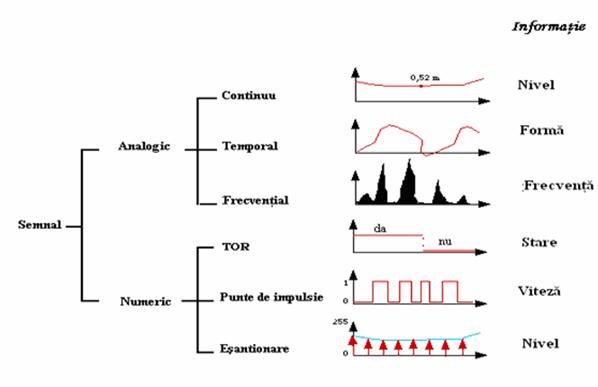
Tipuri de semnale aplicate SRA

CLASIFICAREA SEMNALELOR UTILIZATE IN SRA
(dupa A. Szuder)
 TIPURI DE ITEMI
TIPURI DE ITEMI
SUBIECTUL I
I. Pentru fiecare dintre enunturile urmatoare, incercuiti litera corespunzatoare raspunsului corect.
Sistemul automat reprezinta reuniunea a doua subsisteme:
In schema bloc a SRA, marimea de la intrarea elementului de executie se numeste:
a. Marime de executie;
b. Marime de reactie;
c. Marime de comanda;
d. Marime de iesire
In schema bloc a SRA, marimea de la intrarea regulatorului automat se numeste:
a. Marime de actionare;
b. Marime de reactie;
c. Marime de comanda;
d. Marime de iesire
In schema bloc a SRA, marimea de la intrarea elementului de comparatie se numeste:
a. Marime de executie;
b. Marime de reactie;
c. Marime de comanda;
d. Marime de iesire
In cazul unui SRA, perturbatiile actioneaza asupra:
a. Regulatorului automat;
b. Instalatiei tehnologice;
c. Elementului de executie;
d. Traductorului.
Marimea care se aplica la intrarea regulatorului automat, ce face parte dintr-un SRA, se numeste:
a. Marime de reactie;
b. Marime de reglare;
c. Eroare (abatere);
d. Marime perturbatoare.
Pe calea de reactie a unui SRA este:
a. Regulatorul automat;
b. Traductorul;
c. Elementul de comparatie;
d. Elementul de executie.
Intr-un sistem automat, marimea care se aplica la intrarea dispozitivului de automatizare se numeste:
a. Marime de comanda;
b. Marime de reglare;
c. Marime de referinta;
d. Marime perturbatoare.
Sistemele automate se pot clasifica in sisteme monovariabile si sisteme multivariabile daca se are in vedere criteriul:
a. Modul de variatie a marimilor din sistem;
b. Numarul de parametrii reglati;
c. Natura echipamentului de automatizare;
d. Viteza de raspuns a proceselor automatizate.
Dupa constructia dispozitivului de automatizare si tipul de semnale folosite, sistemele automate pot fi:
a. Electronice, pneumatice, hidraulice sau mixte;
b. Continue si discrete;
c. Cu echipamente unificate sau cu echipamente specializate;
d. Liniare sau neliniare.
Sistemele automate se pot clasifica in sisteme monovariabile si sisteme multivariabile daca se are in vedere criteriul:
a. Modul de variatie a marimilor din sistem;
b. Numarul parametrilor reglati;
c. Natura echipamentelor de automatizare;
d. Viteza de raspuns a proceselor automatizate.
In functie de tipul ecuatiei care descrie comportarea dinamica, sistemele automate pot fi:
a. Electronice, pneumatice, hidraulice sau mixte;
b. Continue si discrete;
c. Cu echipamente unificate sau cu echipamente specializate;
d. Liniare sau neliniare.
Intr-un SRA traductorul este situat:
a. Pe calea directa intre regulatorul automat si elementul de executie;
b. Pe calea indirecta intre elementul de comparatie si regulatorul automat;
c. Pe calea directa intre elementul de executie si instalatia tehnologica;
d. Pe calea indirecta intre instalatia tehnologica si elementul de comparatie;
Intr-un SRA, marimea de comanda actioneaza asupra:
a. Traductorului;
b. Regulatorului automat;
c. Instalatiei tehnologice,
d. Elementului de executie.
Ce marime exercita influente nedorite asupra marimii de iesire a SRA?
a. Marimea de intrare;
b. Abaterea;
c. Perturbatiile;
d. Marimea de reactie.
Ce element component al SRA permite obtinerea abaterii?
a. Elementul de comparatie;
b. Traductorul;
c. Elementul de executie;
d. Regulatorul automat.
Abaterea marimii de iesire de la valoarea prescrisa prin marimea de intrare a unui SRA se obtine la iesirea:
a. Traductorului;
b. Regulatorului automat;
c. Elementul de comparatie;
d. Elementul de executie.
Marimea care este supusa reglarii intr-o valoare prescrisa este cunoscuta sub denumirea de:
a. Marime de referinta;
b. Marime reglata;
c. Marime perturbatoare;
d. Marime de executie.
Rolul elementului de executie este:
a. De a actiona asupra instalatiei tehnologice la o comanda data de regulatorul automat;
b. De a modifica valoarea marimii de referinta;
c. De a compara marimea de iesire cu valoarea prescrisa;
d. De a transforma o marime de natura neelecrica intr-o marime de natura electrica.
Rolul traductorului este:
a. De a actiona asupra instalatiei tehnologice la o comanda data de regulatorul automat;
b. De a modifica valoarea marimii de referinta;
c. De a compara marimea de iesire cu valoarea prescrisa;
d. De a transforma o marime de natura neelecrica intr-o marime de natura electrica.
Rolul elementului de comparatie este:
a. De a actiona asupra instalatiei tehnologice la o comanda data de regulatorul automat;
b. De a modifica valoarea marimii de referinta;
c. De a compara marimea de iesire cu valoarea prescrisa;
d. De a transforma o marime de natura neelecrica intr-o marime de natura electrica.
Elementul care realizeaza conversia unei marimi fizice, de regula neelectrica, intr-o alta marime fizica, de regula electrica, se numeste:
a. Traductor;
b. Element de prescriere;
c. Adaptor;
d. Comparator.
Regulatorul automat al unui SRA are rolul de a prelucra:
a. Semnalul de eroare,
b. Marimea de intrare a sistemului,
c. Marimea de reactie;
d. Perturbatiile.
Intr-un SRA, valoarea la care este mentinuta marimea reglata se numeste:
a. Valoare limita;
b. Valoare prescrisa;
c. Valoare optima;
d. Valoare critica.
Intr-un SRA, marimea de reactie este furnizata de:
a. Elementul de comparatie;
b. Regulatorul automat,
c. Elementul de executie;
d. Traductor.
Intr-un SRA, eroarea (abaterea) este data de diferenta dintre:
a. Marimea de referinta si marimea de reactie;
b. Marimea de referinta si marimea de iesire a sistemului;
c. Marimea de reactie si marimea de iesire a sistemului;
d. Marimea de referinta si suma marimilor perturbatoare.
Rolul elementului de executie este:
a. De a executa o comanda primita de la instalatia tehnologica condusa;
b. De a modifica valoarea marimii de referinta;
c. De a actiona asupra instalatiei tehnologice la o comanda data de regulatorul automat;
d. De a transforma o marime de natura neelectrica intr-o marime de natura electrica.
Marimea de intrare care este independenta de actiunile de conducere din sistemul automat, dar care influienteaza marimea de iesire se numeste:
a. Marime de referinta;
b. Marime de comanda;
c. Marime de executie;
d. Marime perturbatoare.
Elementul de comparatie al unui SRA are rolul:
a. De a efectua anumite operatii asupra semnalului de eroare primit la intrare;
b. De a intervenii in functionarea instalatiei tehnologice pentru corectarea parametrilor;
c. De a transforma marimea de iesire a instalatiei tehnologice intr-un semnal electric;
d. De a compara permanent marimea de reactie cu o marime de acelasi fel, cu valoare prescrisa.
Semnalul la a carui valoare trebuie sa ajunga marimea reglata se numeste:
a. Marime de comanda;
b. Eroare;
c. Marime de referinta;
d. Marime de executie.
I. 2.1. In coloana A sunt enumerate elementele componente ale SRA, iar in coloana B sunt enumerate marimile obtinute la iesirea acestora. Scrieti pe foaia de examen asocierile corecte dintre fiecare cifra din coloana A si litera corespunzatoare din coloana B.
|
A. |
B |
|
1. element de comparatie 2. element de executie 3. instalatie automatizata 4. regulator 5. traductor de reactie |
a. marime de actionare b. marime de comanda c. marime de executie d. marime de iesire e. marime de reactie f. marime perturbatoare |
I. 2.2. In coloana A sunt indicate elementele componente ale SRA, iar in coloana B sunt precizate marimile aplicate la intrarea acestora. Scrieti pe foaia de examen asocierile corecte dintre fiecare cifra din coloana A si litera corespunzatoare din coloana B.
|
A. |
B |
|
1. element de comparatie 2. element de executie 3. instalatie automatizata 4. regulator 5. traductor de reactie |
a. marime de actionare b. marime de comanda c. marime de executie d. marime de iesire e. marime de reactie f. marime de semnalizare |
I. 2.3. In coloana A sunt prezentate diferite blocuri componente ale unui SRA, iar in coloana B este precizat rolul indeplinit de acestea. Scrieti pe foaia de examen asocierile corecte dintre fiecare cifra din coloana A si litera corespunzatoare din coloana B.
|
A. |
B |
|
1. element de comparatie 2. traductor de reactie 3. element de prescriere 4. element de executie 5. regulator automat |
a. actioneaza asupra instalatiei tehnologice b. fixeaza valoarea marimii de referinta c. perturba functionarea instalatiei tehnologice d. compara marimea de intrare (de referinta) cu marimea de la iesirea traductorului (de reactie) e. converteste marimea reglata intr-o marime de alta natura in vederea compararii cu marimea prescrisa f. furnizeaza la iesire marimea de comanda |
I. 2.4. In coloana A sunt prezentate diferite criterii de clasificare ale sistemelor automate, iar in coloana B sunt precizate tipuri de SRA. Scrieti pe foaia de examen asocierile corecte dintre fiecare cifra din coloana A si litera corespunzatoare din coloana B.
|
A. |
B |
|
|
1. numarul de bucle de reglare |
a. |
SRA cu actiune continua SRA cu actiune discontinua (discreta) |
|
2. aspectul variatiei in timp a marimii de intrare |
b. |
SRA pentru procese lente SRA pentru procese rapide |
|
3. viteza de raspuns a obiectului reglarii |
c. |
Sisteme de stabilizare automata Sisteme cu reglare automata cu program variabil |
|
4. numarul marimilor reglate de la iesire |
d. |
SRA cu o singura marime reglata SRA cu mai multe marimi reglate |
|
5. modul de variatie a marimilor din sistem |
e. |
SRA cu marime de referinta constanta in timp SRA variabile |
|
f. |
SRA cu o bucla de reglare SRA cu mai multe bucle de reglare |
|
I. 2.5. In coloana A sunt enumerate elementele componente ale unui SRA, iar in coloana B este precizat rolul indeplinit de acestea. Scrieti pe foaia de examen asocierile corecte dintre fiecare cifra din coloana A si litera corespunzatoare din coloana B.
|
A. |
B |
|
1. EC - element de comparatie 2. RA - regulator automat 3. EE - element de executie 4. IT - instalatie tehnologica 5. Tr - traductor de reactie |
a. intervine in functionarea instalatiei tehnologice pentru corectarea parametrilor reglati b. compara permanent marimea de iesire a instalatiei tehnologice cu o marime de acelasi fel cu valoarea prescrisa c. transforma marimea de iesire a IT intr-un semnal aplicat EC d. prelucreaza operational semnalul de eroare si da la iesire un semnal de comanda pentru elementul de executie e. este supus unor actiuni externe de tip perturbatii si actiunii comenzii generate de RA f. masoara caracteristicile electrice cu ajutorul aparatelor de masura |
I. 3. Scrieti in spatiul din fata fiecarui enunt litera A, daca apreciati ca enuntul este adevarat sau litera F. Transformati enunturile false in enunturi adevarate:
a. Elementul component al SRA care permite obtinerea abaterii, se numeste element de executie.
b. Actiunea perturbatiilor asupra unui proces determina diferenta dintre marimea de iesire si dea prescrisa.
c. Elementul de executie din structura unui SRA, are rolul de a prelucra marimea de la iesirea elementului de comparatie dupa o lege prestabilita.
d. Prin Sistem de Reglare Automata se intelege un sistem realizat astfel incat intre marimea de iesire si marimea de intrare se realizeaza automat, fara interventia omului, o relatie functionala care reflecta legea de conducere a unui proces.
e. Traductorul este instalat pe bucla de reactie negativa are rolul de a transforma marimea de intrare a IT de regula intr-un semnal electric aplicat EC.
f. Influientele care modifica marimea de executie Xm se datoreaza perturbatiilor ce pot aparea in timpul reglarii.
g. In cadrul schemei functionale a unui SRA sunt date elementele componente, destinatia acestora si legaturile functionale.
h. Elementul de executie reprezinta partea prin care dispozitivul de automatizare actioneaza asupra instalatiei tehnologice.
i. Elementul de executie se afla pozitionat intre traductor si instalatia tehnologica.
j. Eroarea (abaterea) rezultata din elementul de comparatie se aplica la intrarea regulatorului automat.
k. Elementul SRA care genereaza comanda este regulatorul automat.
l. Elementul de comparatie a unui SRA are rolul de a compara permanent marimea de iesire a instalatiei tehnologice cu o marime de acelasi fel cu valoarea prescrisa, rezultatul comparatiei fiind semnalul de eroare ε.
m. Elementul care permite convertireaunei marimi fizice (de obicei neelectrica) intr-o alta marime (de obicei electrica) dependenta de prima, in scopul introducerii acesteia intr-un circuit de automatizare, se numeste regulator automat.
n. Marimea de comanda se aplica la intrarea regulatorului automat.
SUBIECTUL II
II. 1.1. Enumerati doua cauze posibile ale aparitiei perturbatiilor in functionarea unei instalatii tehnologice
II. 1.2. Precizati rolul dispozitivului de automatizare dintr-un SRA.
II. 1.3. Definiti Sistemul de Reglare Automata.
II. 1.4. Precizati semnificatia cuvintului reglare ca termen specific utilizat in domeniul automatizarilor.
II. 2. Scrieti informatia corecta care completeaza spatiile libere:
a. Reglarea este un 1 prin care o marime 2 este mentinuta sau i se 3 valoarea prescrisa conform cerintelor procesului industrial.
b. Marimea care este supusa reglarii intr-o valoare 4 este cunoscuta sub denumirea de marime reglata .
c. Intr-un sistem de automatizare in circuit inchis exista atat calea directa prin care informatia se transmite de la dispozitivul de automatizare la instalatia tehnologica, cat si 5 prin care informatia se transmite de la IT la DA.
d. Elementul de 6 este cel cu ajutorul caruia se fixeaza programul sistemului automat sau referinta.
e. Dupa caracterul prelucrarii semnalelor se deosebesc SRA continue si SRA 7 .
f. Perturbatiile care intervin intr-un proces tehnologic se pot datora sarcinilor 8 cu care lucreaza instalatia tehnologica.
g. Elementul de 9 reprezinta partea prin care dispozitivul de automatizare actioneaza asupra instalatiei tehnologice.
h. Marimea care este supusa reglarii intr-o valoare prescrisa este cunoscuta sub denumirea de marime 10 .
i. Traductoarele se folosesc cu precadere la masurarea marimilor 11 pe cale electrica.
j. Marimea de la intrarea elementului de executie din cadrul unui SRA este cunoscuta sub denumirea de marime de 12 .
k. Elementul de masurare se plaseaza pe legatura 13 a unui SRA.
l. Elementul de executie se plaseaza pe legatura 14 a unui SRA.
m. Instalatia tehnologica este, in cazul general, un sistem supus unor actiuni externe numite 15 si actiunii comenzii generate de regulatorul automat a carui marime de iesire este reglata conform unui 16 .
n. Elementul de comparatie are rolul de a compara permanent marimea de reactie de la iesirea traductorului cu o marime de aceasi valoare 17 , rezultatul comparatiei fiind semnalul de eroare.
o. Intr-un sistem de automatizare in circuit inchis exista atit calea directa prin care informatia se transmite de la DA la IT, cit si calea 18 prin care informatia se transmite de la IT la Da.
p. In cadrul procesului de reglare, variatia marimii de iesire este controlata prin masurare cu 19 si corectata in caz de necesitate.
q. Marimea care este supusa reglarii intr-o 20 este cunoscuta sub denumirea de marime reglata.
r. Reglarea automata este ansamblul de operatii indeplinite in mod automat prin care o marime fizica este mentinuta la o valoare 21 .
s. Perturbatiile exercita influiente nedorite asupra marimii de 22 a SRA.
t. Informatia privind valoarea parametrului controlat este adusa de la iesire la intrarea unui sistem de automatizare pe calea de 23 .
u. Intr-un sistem automatizat, elementul care intervine in functionarea instalatiei tehnologice este organul de 24 .
v. Dupa caracterul prelucrarii semnalelor se deosebesc SRA cu actiune continua si SRA cu actiune 25 .
II. 3.1. Se considera schema unui sistem de automatizare, din figura de mai jos:
Precizati denumirile marimilor rr si u
II. 3.2. Se considera schema din figura de mai jos:
II. 3.3. Se considera sistemul de reglare automata din figura de mai jos:
a. Precizati denumirea elementelor componente ale sistemului de reglare automata numerotate cu 1, 2, 3, 4 si 5.
b. Explicati rolul lor functional.
c. Precizati functionarea sistemului de reglare automata
II. 3.4. Se considera schema din figura de mai jos:
a. Indicati semnificatia schemei din figura.
b. Precizati denumirile marimilor si blocurilor ce intervin in schema.
c. Enumerati doua cauze ale perturbatiilor.
II. 3.5. Se considera sistemul de reglare automata din figura de mai jos:
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 22150
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved