| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Motoare speciale sincrone
Cea
mai importanta caracteristica a motoarelor sincrone este acea ca
viteza lor de rotatie este direct proportionala cu frecventa tensiunii de
alimentare conform relatiei ![]() , unde p reprezinta numarul perechilor de poli, f
este frecventa in Hz, iar n turatia in rot/min.
, unde p reprezinta numarul perechilor de poli, f
este frecventa in Hz, iar n turatia in rot/min.
Putem avea urmatoarele tipuri de motoare sincrone:
1.Dupa principiul de conversie a energiei
cu excitatie electromagnetica;
cu magneti permanenti;
cu reluctanta variabila;
cu histerezis.
2.Dupa caracterul alimentarii:
cu alimentare continua;
motoare pas cu pas.
3.Dupa caracterul comenzii:
cu comanda din exterior;
autocomandate (cu comutator electronic).
4.Dupa relatia intre viteza de rotatie si cea de sincronism:
normale;
reductoare.
Motoarele sincrone speciale se construiesc intr-o gama foarte larga de puteri, de la zecimi de watt pana la zeci de kilowati, cu turatii de la 1/luna la 300000 rot/min.
Avantajul acestor motoare fata de cele sincrone clasice consta in lipsa contactelor alunecatoare, a uzurii periilor si inelelor, a intretinerii usoare, posibilitatea functionarii in medii explozive.
Magnetii permanenti permit realizarea unor masini sincrone de constructie foarte simpla, fara contacte alunecatoare si fara infasurari de excitatie, de fiabilitate crescuta, dimensiuni si greutate reduse, pret de cost scazut si randament ridicat.
Aceste motoare cu MP pot fi proiectate sa functioneze pentru sarcina nominala la cosφ=1 sau chiar capacitiv. Se utilizeaza in actionari de viteza variabila, in industria chimica, textila, in sisteme de urmarire de viteza, in aparatura medicala si de inregistrare, etc.
Constructia lor este asemanatoare cu a motoarelor asincrone, prezentand in crestaturile statorului un sistem bi, tri sau polifazat de infasurari. Pentru masinile de putere mica aceste infasurari pot fi concentrate si aranjate in diverse geometrii functie de solutia constructiva aleasa.
Motor sincron trifazat cu MP
Rotorul se realizeaza in doua variante constructive:
cu poli aparenti si colivie de pornire, constructie clasica;
cu poli gheara, solutie utilizata in general la putere mai mica si pentru un numar mare de poli.


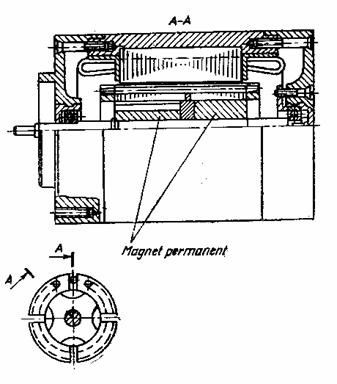
Rotorul cu poli in forma de gheara este constituit dintr-un magnet cilindric magnetizat in sens axial si doua saibe din material feromagnetic, de o parte si alta saibele prezentand o serie de armaturi polare care se intrepatrund alternativ la periferia exterioara a magnetului, formand un sistem magnetic multipolar. Aceste gheare fiind masive joaca si rolul unei colivii de amortizare si pornire, pornire care pentru puteri mici si momente de inertie reduse poate fi asigurata chiar si de cuplul sincron tranzitoriu dezvoltat de masina.


|
Fig. 2.1. Masina sincrona: a) Schema electrica, b) Schema modelului ortogonal |
Asa cum se observa in figura, colivia a fost inlocuita prin doua infasurari echivalente dispuse la 90 de grade dupa axele D si Q (ale rotorului). Magnetul permanent este inlocuit cu o infasurare supraconductoare E caracterizata doar de campul produs de curentul echivalent Ie, constant pentru orice regim de functionare. Daca se inlocuieste infasurarea trifazata statorica cu una bifazata dispusa dupa axele d si q ale infasurarii statorice atunci ecuatiile se pot scrie astfel:
Daca prima ec. o inmultim cu id iar pe a doua cu iq si le adunam obtinem:
![]() Se observa astfel ca
puterea absorbita la borne se regaseste o parte ca pierderi in infasurarile
statorice(primii doi termeni), o parte ca energie magnetica in infasurarile
statorice(urmatorii doi termeni), ceea ce inseamna ca ultimul termen reprezinta
puterea transmisa prin intrefier rotorului si anume
Se observa astfel ca
puterea absorbita la borne se regaseste o parte ca pierderi in infasurarile
statorice(primii doi termeni), o parte ca energie magnetica in infasurarile
statorice(urmatorii doi termeni), ceea ce inseamna ca ultimul termen reprezinta
puterea transmisa prin intrefier rotorului si anume ![]() din care rezulta
cuplul electromagnetic
din care rezulta
cuplul electromagnetic![]()
![]() , unde p reprezinta numarul perechilor de poli.
, unde p reprezinta numarul perechilor de poli.
Intre tensiunile ud,uq, curentii id,iq si tensiunile uA, uB,uC respectiv curentii iA,iB,iC exista relatiile:

Sistemul de referinta a fost astfel ales incat axa longitudinala d sa corespunda cu axa longitudinala a masinii, iar cea transversala q sa corespunda cu cea transversala a masinii.
Daca se alimenteaza masina cu un sistem trifazat simetric de tensiuni, atunci avem:

si
in acest caz ne rezulta 
In regim sincron curentii din colivia de amortizare sunt zero, deci ID=0, IQ=0. De asemenea daca consideram cazul particular de mers in gol ideal cand Id=0, Iq=0,
atunci vom avea doar un
flux (![]() produs de curentul echivalent Ie, ceea ce inseamna
ca vom avea doar tensiunea Uq diferita de zero. Generalizand,
pentru un regim diferit de cel de mers in gol ideal aceasta inseamna ca in
regim de motor masina ramane in urma cu un unghi intern δ>0.
produs de curentul echivalent Ie, ceea ce inseamna
ca vom avea doar tensiunea Uq diferita de zero. Generalizand,
pentru un regim diferit de cel de mers in gol ideal aceasta inseamna ca in
regim de motor masina ramane in urma cu un unghi intern δ>0.
Daca se considera un coeficient de suprasarcina de 1,52 (la fel ca la masinile sincrone clasice), functionarea normala are loc la un unghi intern in plaja de 030-400, in acest domeniu functionarea fiind stabila.
Pornirea motoarelor sincrone cu MP se face in asincron, colivia de amortizare avand si rol de pornire.
La fel ca la orice masina asincrona cu rotorul in scurtcircuit, curentul de pornire poate fi foarte mare(58In), ceea ce poate duce la demagnetizarea MP si deci la scaderea performnatelor masinii.
Pentru evitarea acestui lucru trebuie asigurata o colivie puternica, care sa ecraneze magnetul permanent.
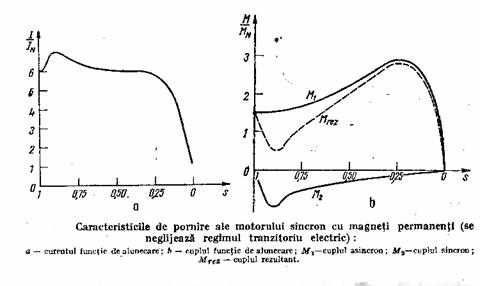
Un al doilea fenomen particular ce apare la pornirea masinilor sincrone cu MP este aparitia unei sei in caracteristica sa de pornire, la alunecari apropiate de 1. Daca cuplul de sarcina este mai mare decat acest minim, motorul nu mai intra in sincronism si ramane blocat la o viteza foarte mica de rotatie.
Cauza
poate fi explicata prin faptul ca odata ce incepe sa se invarta rotorul cu MP,
va induce t.e.m. de rotatie de frecventa scazuta ![]() cu valoarea efectiva
cu valoarea efectiva ![]() care la randul lor dau nastere la curenti care se inchid prin
sursa de alimentare. In cazul in care sistemul are putere mare, impedanta sa
proprie este foarte mica si are caracter puternic inductiv (rezistenta este
mica).La frecvente scazute, cum sunt acesti curenti, reactanta este foarte
mica, doar rezistenta sistemului care si aceasta este mica limiteaza acesti
curenti, care desi sunt produsi de o tensiune em. mica, au amplitudine ridicata
si sunt pur activi, putand ajunge la valori de (12)In. Acesti
curenti dau nastere la un cuplu de franare, care daca se neglijeaza pierderile
in infasurarea statorica se poate scrie ca:
care la randul lor dau nastere la curenti care se inchid prin
sursa de alimentare. In cazul in care sistemul are putere mare, impedanta sa
proprie este foarte mica si are caracter puternic inductiv (rezistenta este
mica).La frecvente scazute, cum sunt acesti curenti, reactanta este foarte
mica, doar rezistenta sistemului care si aceasta este mica limiteaza acesti
curenti, care desi sunt produsi de o tensiune em. mica, au amplitudine ridicata
si sunt pur activi, putand ajunge la valori de (12)In. Acesti
curenti dau nastere la un cuplu de franare, care daca se neglijeaza pierderile
in infasurarea statorica se poate scrie ca:
![]()
Deci acest cuplu trebuie scazut din cel asincron si in cazul in care motorul este necorespunzator proiectat, cuplul rezultant poate deveni negativ si masina nu mai functioneaza. Pentru a evita acest fenomen, in general se scade fluxul dat de magnet, masina functionand subexcitata in perioada de pornire.
Daca cuplul rezultant este pozitiv, pe masura ce turatia creste, creste si frecventa acestor curenti, deci va creste si reactanta sistemului si cu toate ca t.e.m. creste curentul scade, caracterul sau devine inductiv si factorul de putere se reduce. Ca urmare a acestor efecte cuplul rezistent se reduce si efectul sau nu mai este sesizabil.
Un fenomen asemanator apare si la masinile sincrone cu excitatie statica.
Constructia acestor motoare este asemanatoare cu cea a motoarelor asincrone, prezentand insa un intrefier ma mare. Statorul are o infasurare bi sau trifazata in stea dispusa in crestaturi.Rotorul prezinta o anizotropie magnetica realizata fie printr-o constructie cu poli aparenti, fie printr-un rotor segmentat, fie folosind bariere nemagnetice, sau combinat.

Cuplul
de pornire apare ca urmare a diferentei intre reactanta sincona longitudinala
si cea transversala, urmarindu-se ca aceasta sa fie cat mai mare. De asemenea
factorul de putere este cu atat mai bun ca cat raportul ![]() este mai mare. In
general un raport α=0,2 se poate atinge destul de usor, tinzandu-se spre
un α=0,1.
este mai mare. In
general un raport α=0,2 se poate atinge destul de usor, tinzandu-se spre
un α=0,1.
Pornirea acestor motoare se face in asincron, colivia de amortizare avand si rol de pornire, sau bariarele nemagnetice avand acest rol.
Pentru un moment de inertie mai mare sau un cuplu de sarcina mai mare, intrarea in sincronism este mai anevoioasa, necesitand un timp mai lung. Daca cuplul de sarcina depaseste cuplul de intrare in sincronism, motorul nu mai sincronizeaza penduland permanent in apropierea turatiei de sincronism.
Performante superioare se obtin facand o combinatie intre un motor cu MP (performante energetice mai bune) si unul cu reluctanta variabila(pret de cost mai scazut), rezultand o solutie hibrida, la care magnetii permanenti (ferite de bariu) sunt plasati intre poli si protejati de socul de curent la pornire de barierele nemagnetice.

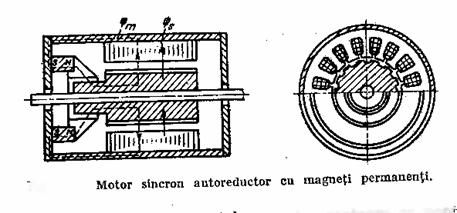
Motoare autoreductoare
Se folosesc acolo unde sunt necesare turatii foarte mici si riguros constante, fiind mai avantajoase decat un motor obisnuit cuplat cu un reductor.
Atat statorul cat si rotorul sunt realizate din tole cu crestaturi deschise. Pe stator se amplaseaza o infasurare bi sau trifazata. Rotorul nu are infasurari. Numerele de dinti statorici si rotorici sunt diferite, diferenta lor fiind un numar par.
Principiul
de functionare este urmatorul: la un moment dat t, axa campului invartitor
statoric ocupa pozitia A(coincide cu axa dintilor 1 si 9, statorul avand in
acest caz 16 dinti). Datorita unui cuplun de anizotropie, rotorul se rotste si
ocupa pozitia de minima reluctanta(campul se inchide prin dintii 1 si
10(rotorul are 19 dinti).Dupa un timp t=T/Z1, unde T este perioada
curentului statoric, axa campului statoric ocupa pozitia B, trecand prin dintii
2 si 10 ai statorului.Campul s-a rotit cu 22,5 grade. Ca urmare a acestei noi
pozitii, rotorul se va invarti in aceslasi sens pana ocupa o noua pozitie de
minima reluctanta, adica campul se inchide prin dintii rotorici 2 si 11. In
acest timp t, rotorul s-a invartit cu un unghi ![]() , avand deci o viteza de 9 ori mai mica decat campul
statoric.
, avand deci o viteza de 9 ori mai mica decat campul
statoric.
Pentru un caz general, viteza unghiulara este:
![]()
Exemplu,
ptr Z2=400, Z1=398, f=50Hz, vom avea o turatie ![]()
Pentru cresterea performantelor se poate utiliza o excitatie prin MP, functionarea fiind identica cu cea anterioara.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 294
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved