| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
TEHNICI DE MODELARE UTILIZATE ÎN PLANIFICAREA SI VALIDAREA MISCARII NOMINALE A ROBOTILOR
1.1 MODELUL GEOMETRIC DIRECT
Cea mai mare parte a cinematicii robotilor se ocupa cu stabilirea diferitelor sisteme de coordonate ce permit determinarea pozitiilor si a orientarii corpurilor rigide si cu determinarea transformarilor care au loc între aceste sisteme. Geometria spatiului tridimensional si miscarea rigida, joaca un rol central în toate aspectele legate de sistemele robot. În acest capitol vor fi studiate operatiile de rotatie si de translatie si se va introduce notiunea de transformare omogena, care combina cele doua operatii într-o singura matrice si care conduce la stabilirea ecuatiilor cinematice directe ale unui robot manipulator.
Scopul acestui capitol este de a prezenta o metodologie ce permite determinarea pozitiei (coordonatelor carteziene) si a orientarii efectorului fata de baza, în functie de valorile variabilelor generalizate atasate articulatiilor.

Figura 1.1.1
Daca consideram doua sisteme de coodonate X0Y0Z0 si X1Y1Z1, cu aceeasi origine O si un punct P din spatiu, putem scrie coordonatele punctului P fata de cele doua sisteme de coordonate sub forma (figura 1.1.1)
![]() (1.1.1) , unde
(1.1.1) , unde
i, j, k sunt versorii unitari asociati respectiv axelor de coordonate X, Y, Z.
Înmultind ecuatia (1.1.1) pe rând cu i1, j1, si k1 obtinem un sistem de ecuatii care matricial se scrie sub forma :
![]() (1.1.2) , unde
(1.1.2) , unde
 reprezinta
coordonatele punctului P fata de sistemul 0
reprezinta
coordonatele punctului P fata de sistemul 0  reprezinta
coordonatele punctului P fata de sistemul 1, ,iar matricea
reprezinta
coordonatele punctului P fata de sistemul 1, ,iar matricea  (1.1.3)
(1.1.3)
reprezinta matricea de transformare de coordonate de orientare (sau matricea de rotatie) a sistemului 1 fata de sistemul 0. Semnificatia coloanelor matricei de rotatie (1.1.3) este urmatoarea : coloana 1 reprezinta proiectiile versorului i1 în sistemul de coordonate 0 (i1i0, i1j0, i1k0), coloana 2 reprezinta proiectiile versorului j1 în sistemul de coordonate 0 (j1i0, j1j0, j1k0), iar coloana 3 reprezinta proiectiile versorului k1 în sistemul de coordonate 0 (k1i0, k1j0, k1k0) (înmultirea dintre versori fiind evident înmultire vectoriala).
În plus matricea de rotatie (1.1.3) are si urmatoarea proprietate :
![]() (1.1.4)
(1.1.4)
adica inversa, matricea de trecere de la sistemul 0 la sistemul 1, se
obtine
prin transpunere. Acest lucru devine transparent tinând cont de
semnificatia coloanelor matricii inverse ![]() , în care de exemplu coloana 1 reprezinta
proiectiile versorului i0 în spatiul de coordonate 1 (i0i1,
i0j1, i0k1) si care este
identica cu linia 1 a matricii
, în care de exemplu coloana 1 reprezinta
proiectiile versorului i0 în spatiul de coordonate 1 (i0i1,
i0j1, i0k1) si care este
identica cu linia 1 a matricii ![]() .
.
Daca
în plus fata de sistemul de baza 0 si de sistemul 1
considerat (numit si sistem curent), sisteme legate prin matricea de
rotatie ![]() , consideram un
al treilea sistem 2, având originea comuna cu celelalte doua, dar care
s-a obtinut printr-o rotatie cu
, consideram un
al treilea sistem 2, având originea comuna cu celelalte doua, dar care
s-a obtinut printr-o rotatie cu ![]() fata de
sistemul curent, atunci postmultiplicând
fata de
sistemul curent, atunci postmultiplicând
![]() cu
cu ![]() obtinem
obtinem ![]() , adica matricea de rotatie a sistemului 2
fata de sistemul de baza 0.
, adica matricea de rotatie a sistemului 2
fata de sistemul de baza 0.
Daca
cea de-a doua rotatie este realizata fata de sistemul de baza,
atunci premultiplicând ![]() cu
cu ![]() obtinem
obtinem ![]() , adica matricea de rotatie a sistemului 2
fata de sistemul de baza 0. În cazul sistemelor cu roboti, în
general rotatia se face fata de sistemul curent, deci matricea
rezultanta se obtine prin postmultiplicare.
, adica matricea de rotatie a sistemului 2
fata de sistemul de baza 0. În cazul sistemelor cu roboti, în
general rotatia se face fata de sistemul curent, deci matricea
rezultanta se obtine prin postmultiplicare.
Daca consideram un numar de sisteme de coordonate având aceeasi origine O, matricea de transformare de coordonare de orientare de la sistemul k la sistemul q (q<k) în mod general se scrie :
 .(1.1.5)
.(1.1.5)
1.1.2 Unghiurile lui Euler
O matrice de rotatie poate fi exprimata si ca produsul unor rotatii succesive în jurul axelor principale, luate într-o ordine specificata. Aceste rotatii definesc unghiurile yaw (rostogolire), pitch (tangaj) si roll (rostogolire), numite în literatura unghiurile lui Euler.
Matricea
de rotatie în jurul axei Z este  (1.1.6),
(1.1.6),
|
|
Figura 1.1.2
|
|
unde s-a
introdus notatia ![]() pentru
pentru ![]() , respectiv
, respectiv ![]() pentru
pentru ![]() .
.
Figura 1.1.3
Matricea
de rotatie în jurul axei Y este  (1.1.7)
(1.1.7)
|
|
Figura 1.1.4
Matricea de rotatie în jurul axei X este :
 (1.1.8)
(1.1.8)
Matricea de transformare la sfirsitul celor trei rotatii este :
 (1.1.9)
(1.1.9)
Ordinea în care se fac cele trei rotatii (1.1.6), (1.1.7) si (1.1.8), este determinanta pentru rezultatul final. De exemplu o rotatie cu y în jurul lui Z0, urmata de o rotatie cu r în jurul lui Y1 nu este egala cu o rotatie cu r în jurul lui Y0, urmata de o rotatie cu y în jurul lui Z1 :
 .
.
Daca sistemele de coordonate nu au aceeasi origine (cum va fi de altfel cazul în sistemele cu roboti) se introduce o matrice care sa cuprinda informatii atât despre orientarea punctului P cât si despre deplasarea lui fata de originea O.
|
|
Figura 1.1.5
X0
Folosind rationamentul anterior (relatia
(1.1.2)), putem scrie
![]() si conform
figurii
si conform
figurii ![]() , deci
, deci ![]() , unde
, unde ![]() reprezinta
distanta de la O1 pâna la O0, exprimata
fata de sistemul 0. Aceasta ultima relatie se poate scrie
sub forma matriciala:
reprezinta
distanta de la O1 pâna la O0, exprimata
fata de sistemul 0. Aceasta ultima relatie se poate scrie
sub forma matriciala:
![]() sau
sau ![]() (1.1.10)
(1.1.10)
unde
 (1.1.11) reprezinta
(1.1.11) reprezinta
matricea de tranformare de coordonate de configurare din sistemul 1 în sistemul 0numita si matricea de transformare omogena.
Generalizând, putem scrie ca pentru q<k matricea de tranformare de coordonate de configurare din sistemul k în sistemul q este :
 (1.1.12)
(1.1.12)
Spre deosebire de cazul anterior, matricea inversa, care da orientarea si pozitia sistemului q fata de sistemul k are acum o forma mai complexa
![]() (1.1.13)
(1.1.13)
Folosind relatia (1.1.13) se poate deduce o relatie de legatura între distanta dintre cele doua sisteme, exprimata în sistemele k si respectiv q si anume :
![]() (1.1.14)
(1.1.14)
Din punct de vedere al analizei cinematice a unui sistem robot, ne putem gândi ca acesta este format dintr-un set de bratele rigide, conectate între ele prin diferite articulatii. Aceste articulatii pot fi foarte simple, cum sunt articulatiile de rotatie si articulatiile de translatie sau pot fi ceva mai complexe. Diferenta este ca în cazul simplu, articulatiile au doar un singur grad de libertate a miscarii, unghiul de rotatie pentru articulatiile de rotatie si valoarea deplasarii liniare în cazul articulatiilor prismatice. În continuare se vor studia numai aceste tipuri simple de articulatii. Scopul analizei cinematicii directe este de a determina cumularea efectelor întregului set de variabile, asociate articulatiilor. Desi, este posibil sa se deduca modelul geometric direct al unui robot folosind sisteme de coordonate arbitrar asociate articulatiilor unui robot, este util sa se sistematizeze alegerea acestor sisteme de coordonate. O conventie de alegere a acestor sisteme foarte des întâlnita în aplicatiile cu roboti este conventia Denavit-Hartenberg.
În cadrul acestei formulari, trecerea de la un sistem de coordonate la altul se face printr-o succesiune de patru transformari distincte: o rotatie si o translatie în jurul axei X, urmata de o rotatie si o translatie în jurul axei Z, sau a doua varianta în care succesiunea este inversa o rotatie si o translatie în jurul axei Z, urmata de o rotatie si o translatie în jurul axei X. Astfel, în functie de ordinea axelor în jurul carora se realizeaza cele doua miscari posibile, X urmata de Z sau Z urmata de X, putem spune ca exista doua metode de stabilire a matricilor omogene de transformare, care difera prin modul de alocare a sistemelor de coordonate atasate articulatiilor si a parametrilor asociati.
Prima metoda de alocare a sistemelor de coordonate este prezentata în figura 1.1.6

Figura 1.1.6
În
aceasta conventie matricea de transformare omogena de la
sistemul i la sistemul i-1 notata cu ![]() reprezinta
rezultatul celor patru transformari si anume :
reprezinta
rezultatul celor patru transformari si anume :

 (1.1.15)
(1.1.15)
unde cei patru parametri qi,, ai,, di,, ai, reprezinta parametri Denavit-Hartenberg asociati bratului i.
Aceasta abordare presupune îndeplinirea a doua conditii ce asigura unicitatea matricii de transformare omogena de la sistemul i la
sistemul i-1 :
(DH1) axa xi sa fie perpendiculara pe axa zi-1
(DH2) axa xi sa intersecteze axa zi-1
Respectându-se aceste conditii exista un set unic de parametrii a, d, q a astfel încât :
![]() (1.1.16)
(1.1.16)
Pentru a arata ca matricea Tii-1 poate fi scrisa în mod unic sub aceasta forma (1.1.15), se pleaca de la scrierea generala :
![]() (1.1.17)
(1.1.17)
|
|
Cele doua ipoteze (DH1) si (DH2) sunt reprezentate în figura 1.1.7
Figura 1.1.7
Conform ipotezei (DH1) vectorul r1 (prima coloana a matricei R, care reprezinta proiectia lui i1 în sistemul 0) este ortogonal cu vectorul k0=[0 0 1]T, de unde rezulta ca r31=0. În continuare trebuie sa aratam ca exista doua unghiuri unice q si a (între 0 si 2p) astfel încât :
 (1.1.18)
(1.1.18)
Deoarece coloanele lui R sunt ortonormate, iar r31=0 rezulta ca :
r112+r212=1, r322+r332=1(1.1.19)
Relatiile (19) conduc la valori unice pentru q si a astfel încât :
(r11,r21)=(cq,sq) si (r33,r32)=(ca,sa (1.1.20)
Odata gasite valorile lui q si a, este usor de verificat ca elementele ramase din matricea R corespund formei (18), folosind faptul ca matricea R este o matrice de rotatie.
Ipoteza (DH2) înseamna ca vectorul d=d01 (vectorul de coordonate al originii sistemului 1 exprimat în coordonatele sistemului 0) este o combinatie liniara între k0 si Ri1.
Deoarece r31=0 putem exprima în mod unic :
d01=dk0+aRi1=dk0+ar1=![]() (1.1.21)
(1.1.21)
Substituind R conform (1.1.18) si d conform (1.1.21) în relatia (1.1.17), obtinem matricea de transformare omogena conforn (1.1.16).
Ceea ce s-a discutat anterior reprezinta semnificatiile logice si conditiile necesare aplicarii formalismului Denavit-Hartenberg si a alegerii parametrilor. În plus se pot desprinde si semnificatii fizice ale parametrilor si anume:
- a reprezinta distanta dintre axele z0 si z1, masurata de-a lungul lui x1,
- unghiul a este masurat într-un plan perpendicular pe x1 între axele z0 si z1,
- parametrul d reprezinta distanta între O0 si intersectia lui x1 cu axa z0 masurata de-a lungul lui z0
- unghiul q reprezinta unghiul dintre x0 si x1 masurat într-un plan perpendicular pe axa z0.
Se poate arata ca pentru un sistem manipulator se pot alege întotdeauna sistemele de coordonate 0, 1,..n în asa fel încât sa se respecte cele doua ipoteze (DH1) si (DH2), în conditiile în care se accepta posibilitatea ca sistemul i sa nu apartina în unele situatii articulatiei i.
La început se indentifica toate axele z0, z1, zn.unde zi este axa de rotatie pentru articulatia i, daca aceasta este de revolutie si axa zi este axa de translatie daca articulatia i este prismatica.
Se alege originea O0, care poate fi aleasa oriunde de-a lungul lui z0. În continuare se aleg axele x0 si y0, arbitrar, cu conditia ca împreuna cu z0 sa formeze un sistem de coordonate cartezian.
Presupunem ca s-au stabilit sistemele 0, 1, i-1. În alegerea sistemului i pot aparea urmatoarele cazuri (a) axele zi-1, zi nu sunt coplanare si (b) axele zi-1, zi sunt coplanare. Daca axele zi-1, zi nu sunt coplanare, atunci exista un unic segment perpendicular pe amândoua si de lungime minima. Acest segment îl va defini pe xi si punctul de intersectie cu zi va defini originea Oi. Atunci prin constructie ambele conditii (DH1) si (DH2) sunt îndeplinite si vectorul de la Oi-1 la Oi este o combinatie liniara între zi-1 si xi. Specificarea sistemului Oi este completata prin alegerea lui yi în asa fel încât sa se obtina un sistem cartezian.
Daca axele zi-1, zi sunt coplanare, atunci ele fie sunt paralele, fie se intersecteaza. Daca sunt paralele, atunci exista o infinitate de normale comune celor doua axe si conditia (DH1) nu specifica în mod unic alegerea lui xi. În acest caz alegem originea Oi în articulatia i în asa fel încât xi este cea normala la zi-1 care trece prin Oi. Alegerea lui Oi este arbitrara în acest caz, se poate alege xi ca fiind si normala care trece prin Oi-1, caz în care diatanta di este egala cu 0. Cum axele zi-1, zi sunt paralele, unghiul ai este 0. Dupa ce a fost ales xi, yi se alege cu singura conditie sa completeze sistemul.
Daca axele zi-1, zi se intersecteaza, axa xi este aleasa perpendiculara pe planul format de zi-1, zi. Directia pozitiva este arbitrara. Cea mai des întâlnita alegere a punctului Oi este la intersectia celor doua axe, dar se poate alege orice punct convenabil de-a lungul lui zi. În acest caz parametrul ai este egal cu 0.
Pentru a se completa constructia este necesar sa se aleaga sistemul de coordonate n. Originea On este de obicei aleasa simetric fata de degetele efectorului. Vectorii unitari ai axelor xn, yn, zn se noteaza cu n, s, a (figura nr 1.1.8). Terminologia vine de la faptul ca directia a este directia de apropiere (approach) a efectorului fata de obiect, directia s este directia de-a lungul careia se misca (sliding) degetele efectorului în sensul de deschidere si închidere a griparului, iar directia n (normal) este directia normala pe planul format de s si a.
|
|
Figura nr 1.1.8
Regulile folosite sunt urmatoarele:
Se stabilesc articulatiile si axele de miscare z0, z1, .zn-1.
Se stabileste sistemul de coordonate de baza. Se alege originea O0 oriunde de-a lungul axei z0. Axele x0 si y0 se aleg arbitrar în asa fel încât sa formeze un sistem de coordonate cartezian.
Pentru i=1,n-1 se parcurg iterativ urmatorii pasi:
Se stabileste originea Oi în punctul în care normala comuna la zi-1 si zi intersecteaza axa zi. Daca zi-1 si zi se intersecteaza se stabileste Oi în punctul de intersectie. Daca zi-1 si zi sunt paralele se stabileste Oi în articulatia i.
Se stabileste axa xi de-a lungul perpendicularei comune la axele zi si zi-1 care trece prin punctul Oi, sau în directia normala la planul (zi-1,zi), daca zi-1 si zi se intersecteaza.
Se stabileste axa yi astfel încât sa completeze sistemul cartezian de coordonate Oixiyiyi.
Se stabileste sistemul de coordonate asociat efectorului Onxnynyn. Daca articulatia n este de rotatie se alege kn=a de-a lungul directiei zn-1. Se stabileste originea On convenabil de-a lungul lui zn, de preferinta în centrul efectorului sau la capatul acestuia. Se alege jn=s în directia de închidere a efectorului si se alege în=n în directia sxa. Daca forma efectorului nu este simpla se aleg xn si yn convenabil în asa fel încât sa se completeze sistemul de coordonate cartezian.
Parametrii Denavit-Hartenberg (parametri ce caracterizeaza complet descrierea pozitiei si a orientarii în spatiu a bratului de robot) sunt dati de urmatorul set de valori:
![]() unghiul
qi
de rotatie în jurul axei zi-1 pentru a suprapune vectorul xi-1 peste vectorul xi
(paralela la xi dusa din Oi-1).
unghiul
qi
de rotatie în jurul axei zi-1 pentru a suprapune vectorul xi-1 peste vectorul xi
(paralela la xi dusa din Oi-1).
distanta di masurata de-a lungul axei zi-1 ,de la originea oi-1 pâna la punctul de intersectie dintre axele xi si zi-1.
![]() unghiul
αi de rotatie în jurul axei xi-1 pentru a
suprapune vectorul zi-1
(paralela la zi-1 dusa din Oi) peste vectorul zi.
unghiul
αi de rotatie în jurul axei xi-1 pentru a
suprapune vectorul zi-1
(paralela la zi-1 dusa din Oi) peste vectorul zi.
distanta ai masurata de-a lungul axei xi, de la punctul de intersectie dintre axele xi si zi-1 pâna la originea Oi.
Prin aceasta metoda sistemul de coordonate Oixiyizi este obtinut din sistemul de coordonate Oi-1xi-1yi-1zi-1 prin urmatoarele miscari:
o translatie cu di de-a lungul lui zi-1, urmata de o rotatie cu qi în jurul lui zi-1;
o translatie cu ai de-a lungul lui xi, urmata de o rotatie cu αi în jurul lui xi;
Matricea care da pozitia efectorului fata de baza se obtine acumulând matricile de transformare omogena ale sistemelor de coordonate intermediare dupa cum urmeaza :
![]() (1.1.22)
(1.1.22)
În general multimea matricilor de transformare omogena nu este comutativa. Numai în cazul în care avem o deplasare de-a lungul unei axe si o rotatie în jurul aceleasi axe, ordinea de înmultire a matricilor nu conteaza:
![]() .
.
A doua metoda de alocare a sistemelor de coordonate si de stabilire a parametrilor Denavit-Hartenberg este prezentata în figura 1.1.9:

Figura 1.1.9
Regulile folosite sunt urmatoarele:
Sistemul de coordonate cu originea Oi-1 se va plasa în articulatia 'i-1'. Primul sistem de coordonate Ox0y0z0 se stabileste în baza sistemului de miscare si nu reflecta prima tendinta de miscare. Sistemul de coordonate în jurul caruia se realizeaza prima miscare, de translatie sau de rotatie, este O1x1y1z1 .
Axa zi-1 este axa de miscare, adica se alege astfel încât miscarea articulatiei i sa fie de rotatie în jurul axei zi-1, sau de translatie de-a lungul axei zi-1. Cu aceasta regula se stabilesc toate axele zi-1 din articulatiile robotului.
Axa xi-1 se stabileste de-a lungul perpendicularei comune între axele zi-1 si zi .
Axa yi-1 se alege astfel încât sa completeze sistemul cartezian de coordonate Oixi-1yi-1zi-1.
Parametrii Denavit-Hartenberg sunt dati de urmatorul set de valori:
![]() unghiul
αi de rotatie în jurul axei xi-1 pentru a
suprapune vectorul zi-1 peste vectorul zi (paralela la zi
dusa din Oi-1).
unghiul
αi de rotatie în jurul axei xi-1 pentru a
suprapune vectorul zi-1 peste vectorul zi (paralela la zi
dusa din Oi-1).
distanta bi masurata de-a lungul axei xi-1 ,de la originea Oi-1 pâna la punctul de intersectie dintre axele xi-1 si zi.
![]() unghiul
qi
de rotatie în jurul axei zi pentru a suprapune vectorul xi-1
(paralela la xi-1 dusa din Oi) peste vectorul xi
.
unghiul
qi
de rotatie în jurul axei zi pentru a suprapune vectorul xi-1
(paralela la xi-1 dusa din Oi) peste vectorul xi
.
distanta di masurata de-a lungul axei zi, de la originea Oi pâna la punctul de intersectie dintre axele xi-1 si zi.
Matricea de transformare omogena este :

 (1.1.23)
(1.1.23)
Pasii algoritmului sunt urmatorii: mai întai se stabileste un sistem de coordonate de baza 0, care este fix si ales arbitrar. Apoi se aleg axele zi în jurul carora sau de-a lungul carora se realizaza miscarea celor n bratele ale robotului. Pentru articulatiile de rotatie, axele zi se aleg astfel încât rotatia sa se faca în sensul pozitiv al axelor conform regulii burghiului drept, iar pentru articulatiile de translatie, axele zi se aleg astfel încât deplasarea sa aiba loc în sensul pozitiv al axelor. Dupa ce toate axele zi au fost stabilite, se stabilesc axele xi astfel încât xi (zi,zi+1). Daca zi si zi+1 se intersecteaza sau sunt paralele, alegerea lui xi este arbitrara. Axele yi se aleg în mod unic corespunzator regulii burghiului drept. Deoarece nu sunt folosite în determinarea parametrilor Denavit-Hartenberg pot sa nu fie figurate.
Observatie. Alegerea parametrilor Denavit-Hartenberg asa cum a fost mentionata mai sus asigura urmatoarele:
parametrii ai si bi sunt constanti si dependenti doar de configuratia geometrica a robotului
parametrul qi este variabil daca articulatia i este o articulatie de rotatie
parametrul di este variabil daca articulatia i este o articulatie de translatie
În capitolul precedent a fost prezentat modelul cinematic direct, prin care se determina configuratia (pozitie si orientare) a efectorului fata de baza, functie de valorile cunoscute asociate articulatiilor. În acest capitol va fi prezentata problema mult mai dificila a modelului cinematic invers, prin care se determina setul particular al variabilelor generalizate, asociate articulatiilor, care produc o configuratie cinematica cunoscuta si dorita a efectorului.
Vom exemplifica aceasta metoda numai pentru robotul planar.
|
|
Figura 1.2.1
Daca impunem ca originea efectorului (adica punctul Ot) sa se gaseasca la coordonatele notate generic (px, py, pz=0 în cazul robotului planar) exprimate fata de sistemul de baza si sa fie orientat cu unghiul a ca în figura 1.2.1, atunci putem scrie o prima egalitate
 (1.2.1)
(1.2.1)
Cinamatica inversa aplicata acestui tip de robot presupune aflarea parametrilor q y si h pentru o matrice cunoscuta Tt0 , adica pentru un a cunoscut si o pozitie (px, py) cunoscuta. Din egalitatea (1) rezulta o prima relatie :
cos(q y)=cos(a) adica q y a (1.2.2)
Solutia
problemei cinematice inverse consta în urmatoarea procedura
repetitiva: se înmulteste succesiv relatia ![]() cu inversele matricilor omogene de transformare, pentru ca
succesiv variabilele generalizate sa migreze din partea stânga a valorilor
necunoscute în partea dreapta a valorilor cunoscute.
cu inversele matricilor omogene de transformare, pentru ca
succesiv variabilele generalizate sa migreze din partea stânga a valorilor
necunoscute în partea dreapta a valorilor cunoscute.
În continuare se va explicita aceasta procedura pentru robotul planar :
unde T01 este singura matrice dependenta de q
Scopul înmultirii este de a muta dependenta lui q din partea stânga a ecuatiei, în partea dreapta, unde se gasesc valorile cunoscute. În continuare vom considera doar ultima coloana, lucru care este notat cu un indice inferior atasat matricii, adica notatia Tii-1j reprezinta coloana j din matricea Tii-1.
![]() adica
adica ![]() .
.
Deci putem scrie
Analog
putem scrie 
De unde rezulta o noua relatie :
 (1.2.3)
(1.2.3)
În
continuare premultiplicam cu  si obtinem
urmatoarele relatii :
si obtinem
urmatoarele relatii :
![]() , adica
, adica ![]() .
.
Explicit înseamna :
 si
si
 .
.
Egalând cei doi vectori obtinem relatia urmatoare :
 (1.2.4)
(1.2.4)
Procedura
se continua cu  si
si ![]() . Adica
. Adica


Egalând cei doi vectori obtinem relatia
 (1.2.5)
(1.2.5)
Din
relatiile (1.2.1) si (1.2.2) obtinem 
Din
relatia (1.2.3) obtinem 
Ecuatiile obtinute din relatia (1.2.4) sunt echivalente cu cele obtinute din relatia (1.2.1).
Din
relatia (1.2.5) avem :  .
.
Ecuatiile
![]() si
si ![]() sunt de forma
sunt de forma ![]() .
.
Însumând cele doua ecuatii dupa ce au fost ridicate la patrat, obtinem :
![]()
de unde deducem expresia lui h si anume :
![]() .
.
Tot din sistemul anterior rezulta si valoarea unghiului q si anume :
 , unde
, unde
Atan2 este o extensie a functiei trigonometrice arctangenta care tine cont de semnele numitorului si numaratorului si în acest fel furnizeaza o solutie unica.
|
|
1. Dându-se o pozitie dorita a efectorului, câte solutii exista pentru cinematica inversa asociata robotului planar din figura 1.2.2 ? Daca în plus si orientarea efectorului este specificata, câte solutii exista? Folositi si abordarea geometrica pentru a rezolva problema.
Figura 1.2.2
|
|
2. Aceleasi întrebari ca la problema 1, aplicate urmatorului tip de robot din figura nr 1.2.3.
3. Manipulatorul Standford are o configuratie de efector de tip sferic (figura nr 1.2.4). Dându-se o pozitie dorita d si o orientare R a efectorului
(a) Sa se calculeze pozitia dorita pentru centrul încheieturii pc.
(b) Sa se rezolve pozitiile cinematice inverse, adica valorile asociate primelor trei articulatii care vor plasa centrul articulatiei în punctul pc. Exista o solutie unica? Câte solutii se pot gasi?
(c) Calculati matricea de rotatie R03. Rezolvati cinematica inversa asociata acestui manipulator gasind un set de unghiuri Euler corespunzatoare matricii de rotatie R03.
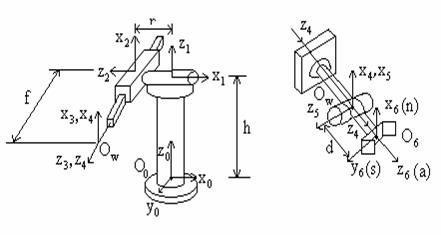
Figura 1.2.4
4. Repetati cerintele din problema 3 pentru robotul de tip Puma care de asemenea are efectorul de tip sferic. Câte solutii se pot gasi?
1.3 MODELAREA CINEMATICA A MISCARII
1.3.1 Cazul planar
Vom nota cu X vectorul care da configuratia completa a efectorului, de dimensiune 3 (plan) si 6 (spatiu) si cu f vectorul parametrilor generalizati asociati articulatiilor bratelelor, de dimensiune n (egala cu numarul de brate
ale robotului).
 (1.3.1)
(1.3.1)
unde
matricea  de dimensiune 3xn sau
6xn este numita matrice Jacobian.
de dimensiune 3xn sau
6xn este numita matrice Jacobian.
Daca
J este matrice patratica si nesingulara J 0,
![]() , atunci putem scrie si relatia inversa :
, atunci putem scrie si relatia inversa :
 (1.3.2)
(1.3.2)
Pentru robotul planar aceste ecuatii cinematice se scriu
 (1.3.3)
(1.3.3)
Determinantul matricii Jacobian este J =-h. Relatia inversa se scrie
 (1.3.4)
(1.3.4)
În cazul robotului planar, vitezele bratelelor pot fi determinate cunoscând vitezele carteziene, daca h 0. Pentru ca q(t) sa fie cunoscut la orice moment trebuie scrise mai întâi ecuatiile cinematice directe.
Ce se
întâmpla când J =0?
Valorile variabilelor generalizate pentru care J =0
se numesc set singular de valori
(generalizate) asociate bratelelor robotului. Anumite elemente ale
vectorului ![]() în apropierea setului
singular vor avea valori foarte mari, de exemplu
în apropierea setului
singular vor avea valori foarte mari, de exemplu ![]() în jurul acestui set va
avea valori foarte mari, tinzând catre .
În acest caz limita, manipulatorul se spune ca este într-o configuratie degenerata,
deoarece libertatea de miscare este restrânsa.
în jurul acestui set va
avea valori foarte mari, tinzând catre .
În acest caz limita, manipulatorul se spune ca este într-o configuratie degenerata,
deoarece libertatea de miscare este restrânsa.
Directiile carteziene particulare de miscare, în care miscarea este imposibila din aceasta configuratie degenerata, se numesc directii carteziene de constrângere. Cum putem afla aceste directii? Plecând de la relatia
![]() (1.3.5)
(1.3.5)
si tinând cont de constrângerea :
![]() (1.3.6)
(1.3.6)
obtinem :
![]() (1.3.7)
(1.3.7)
Ecuatia
(1.3.7) în mod natural exprima setul de viteze carteziene ![]() , relative la sistemul de baza 0, de-a lungul
carora miscarea este posibila plecând de la aceasta
configuratie degenerata.
, relative la sistemul de baza 0, de-a lungul
carora miscarea este posibila plecând de la aceasta
configuratie degenerata.
Altfel
spus, orice set ![]() pentru care
pentru care ![]() reprezinta un
vector de viteze de-a lungul caruia miscarea nu este posibila,
sau o directie carteziana de constrângere. Deoarece
reprezinta un
vector de viteze de-a lungul caruia miscarea nu este posibila,
sau o directie carteziana de constrângere. Deoarece ![]() pentru orice vector
nenul
pentru orice vector
nenul ![]() , atunci
, atunci ![]() reprezinta o
astfel de directie carteziana de constrângere.
reprezinta o
astfel de directie carteziana de constrângere.
În cazul robotului planar
 (1.3.8)
(1.3.8)
care înlocuit în relatia (7) ne da :
![]() (1.3.9)
(1.3.9)
Ecuatia (1.3.9) reprezinta setul vitezelor carteziene de-a lungul carora miscarea este posibila când h=0.
Daca în plus fata de h=0 avem si conditiile q=0 si y=90 din ecuatia (1.3.9) rezulta
![]() (1.3.10)
(1.3.10)
|
|
adica orice miscare în care efectorul are o componenta nenula în directia x (a bazei) este fizic imposibila în aceasta configuratie degenerata. În acest caz directiile carteziene de constrângere în planul sunt toate directiile de miscare cu exceptia celor paralele cu axa y. Semnificatia relatiei (10) este aratata în figura 1.3.1.
Figura 1.3.1
Daca q=30 si y=90 , în plus fata de h=0, ecuatia (1.3.9) este echivalenta cu relatia
![]() (1.3.11)
(1.3.11)
sau ![]() .
.
Miscarea în planul este posibila numai daca
![]() (1.3.12
(1.3.12
Semnificatiile relatiilor (1.3.11) si (1.3.12) este ilustrata în figura 1.3.2.
|
|
Figura 1.3.2
![]() Daca q=30 si y=45 (sau orice alta valoare diferita de 90 ) în plus fata de h=0
ecuatia (1.3.9) este echivalenta cu relatia :
Daca q=30 si y=45 (sau orice alta valoare diferita de 90 ) în plus fata de h=0
ecuatia (1.3.9) este echivalenta cu relatia :
![]() (1.3.13)
(1.3.13)
Miscarea
în planul este posibila pentru orice viteze ![]() alese arbitrar cu
conditia sa se respecte relatia (13).
alese arbitrar cu
conditia sa se respecte relatia (13).
Lucrurile pot continua pâna la aflarea valorilor pentru acceleratii
![]() (1.3.14)
(1.3.14)
si daca J este patrata si nesingulara, se poate scrie si relatia inversa
|
|
![]() (1.3.15)
(1.3.15)
Figura 1.3.3
În cazul tridimensional X va avea 6 termeni, 3 pozitii si 3 orientari.
 (1.3.16)
(1.3.16)
Desi orientarea poate fi definita prin trei unghiuri distincte (ca yaw, pitch si roll) în general este imposibil sa se specifice orientarea prin trei rotatii independente în jurul axeler x, y, z cu unghiurile respectiv fx fy fz si care sa nu depinda de ordinea în care sunt realizate. Dar variatii infinitezimale ale orientarii sunt comutative. De aceea este posibil sa se specifice variatiile în timp ale unghiurilor fx fy fz, adica vitezele unghiulare wx wy wz prin trei ecuatii independente si care nu depind de ordinea miscarilor. Aceste valori nu se obtin ca în cazul planar prin derivare directa. În acest caz procedura de aflare a Jacobianului, este cea prezentata în continuare.
Se pleaca de la relatia bine cunoscuta din mecanica :
 (1.3.17)
(1.3.17)
si se considera în continuare ca P este originea sistemului q+1. Înlocuind în (1.3.17) obtinem :
![]() (1.3.18)
(1.3.18)
Relatia
(1.3.18) se poate simplifica pentru ca  , deoarece
, deoarece ![]() reprezinta
distanta fixa dintre Oq si Oq+1 (trebuie facuta
observatia importanta ca acest formalism este valabil numai pentru
articulatii de rotatie, de exemplu pentru robotul PUMA). Avem
deci :
reprezinta
distanta fixa dintre Oq si Oq+1 (trebuie facuta
observatia importanta ca acest formalism este valabil numai pentru
articulatii de rotatie, de exemplu pentru robotul PUMA). Avem
deci :
![]() (1.3.19)
(1.3.19)
Relatie (19) se va particulariza pentru diferite valori ale lui q.
![]() (1.3.20)
(1.3.20)
deoarece
![]() este un vector fix.
este un vector fix.
![]() (1.3.21)
(1.3.21)
Aceasta procedura poate fi repetata pentru q=3,4,t-1 si se obtine în final
![]() (1.3.22), unde
(1.3.22), unde ![]() reprezinta
pozitia relativa a efectorului fata de baza.
reprezinta
pozitia relativa a efectorului fata de baza.
Datorita
faptului ca sistemele de coordonate au fost stabilite conform
conventiei Denavit-Hartenberg, ![]() este datorat
rotatiei cu
este datorat
rotatiei cu ![]() în jurul axei zq.
Deci putem scrie
în jurul axei zq.
Deci putem scrie
![]() (1.3.23)
(1.3.23)
unde kr este un vector unitar în jurul axei zr (pentru articulatiile de rotatie considerate). Cu aceasta observatie relatia (1.3.22) devine :
![]() (1.3.24)
(1.3.24)
sau altfel grupate
![]() (1.3.25)
(1.3.25)
Daca q<t, atunci este valabila urmatoarea relatie
![]() (1.3.26)
(1.3.26)
Relatia
(1.3.26) înmultita cu ![]() da :
da :
![]() (1.3.27)
(1.3.27)
În continuare înlocuim în relatia (1.3.25) expresia gasita în relatia (1.3.27) si obtinem :
![]() (1.3.28)
(1.3.28)
În
continuare se foloseste relatia ![]() (1.3.29) unde
componentele lui kq în sistemul 0 sunt date de a treia coloana a
matricii de rotatie
(1.3.29) unde
componentele lui kq în sistemul 0 sunt date de a treia coloana a
matricii de rotatie ![]() .
.
Din relatia (1.3.29) si din relatia (1.3.28) rezulta :
![]() (1.3.30)
(1.3.30)
În continuare ne vom ocupa separat de termenul general
![]() (1.3.31)
(1.3.31)
care
este o scriere diferita a înmultirii celor doi vectori, unde ![]() reprezinta liniar
a vectorului
reprezinta liniar
a vectorului ![]() .
.
Daca scriem doar versorii asociati vectorilor, relatie (1.3.31) devine
![]() (1.3.32)
(1.3.32)
În relatia (1.3.28) înlocuim acum ultima relatie obtinuta (1.3.32) si obtinem
![]() (1.3.33)
(1.3.33)
Relatia (1.3.33) este relatia care permite aflarea primelor trei rânduri din matricea Jacobianului J.
În
continuare stiim ca vectorul  deci
deci
 (1.3.34)
(1.3.34)
Vectorul acceleratiilor unghiulare :
 (1.3.35)
(1.3.35)
Relatia finala de calcul a Jacobianului pentru cazul robotilor cu articulatii de rotatie, care se deplaseaza într-un spatiu tridimensional este data de îmbinarea ecuatiilor (1.3.33), (1.3.34) si (1.3.35)
 (1.3.36)
(1.3.36)
unde :
![]() (1.3.37)
(1.3.37)
Matricea Jacobian este data de relatia (1.3.37). Ultima coloana apare doar în cazul în care s-a asociat un reper t efectorului si acesta este fix, adica nu exista o rotatie fata de sistemul anterior. Primele trei rânduri ale lui J se fi numesc Jacobianul de pozitie si se noteaza cu JP, iar celelalte trei se numesc Jacobianul de orientare. Trebuie facuta o ultima observatie si anume accea ca JP se poate obtine si direct prin derivare ecuatiilor care exprima pozitia efectorului functie de variabilele bratelelor, ecuatii obtinute în urma modelului geometric direct.
Tehnica de aflare a miscarii cinematice poate fi simplificata pentru o clasa aparte de roboti, care au 6 grade de libertate si efectorul de tip sferic (cum este cazul robotului PUMA).
Pentru orice robot cu 6 bratele si efectorul de tip sferic ecuatiile de configurare cinematica pot fi separate în partea de pozitionare si partea de orientare. Cele trei unghiuri finale ale bratelelor pot fi calculate separat în functie de o solutii de pozitionare si de orientare dorite penntru punctul Ow (care este punctul de intersectie a axelor de rotatie ale efectorului).
Vom calcula vitezele de translatie ale efectorului (Ow) în functie de primele trei unghiuri ale robotului.
|
|
Figura 1.3.4
Figura 1.3.4 se refera la robotul PUMA, dar este general valabila pentru orice manipulator sferic. Conform figurii nr 4 avem
 (1.3.38)
(1.3.38)
Derivând relatia (1.3.38) obtinem
 (1.3.39)
(1.3.39)
cu  vectorul componentelor
vitezei de translatie a, d
fiind distanta fixa de la Ow la Ot.
vectorul componentelor
vitezei de translatie a, d
fiind distanta fixa de la Ow la Ot.
Ecuatiile cinematice se scriu acum
 (1.3.40)
(1.3.40)
adica  (1.3.41)
(1.3.41)
Pentru aceasta clasa particulara de manipulator primele trei bratele sunt de rotatie, deci putem scrie
Din
relatia (1.3.40) rezulta ca ![]() (1.3.42)
(1.3.42)
Daca
bratul q este prismatic (de translatie) în relatia (1.3.42) putem
pune ![]() .
.
Tot
din relatia (1.3.40) rezulta ca ![]() (1.3.43)
(1.3.43)
care va
fi o functie de cele 6 deplasari. Deoarece  relatia (1.3.43) se scrie :
relatia (1.3.43) se scrie :
![]() (1.3.44) , unde
(1.3.44) , unde ![]() (1.3.45)
(1.3.45)
Deci
Jacobianul se poate calcula conform formulei ![]() , unde valorile particulare ale componentelor sale sunt date
de relatiile (1.3.41), (1.3.42), (1.3.44) si (1.3.45)
, unde valorile particulare ale componentelor sale sunt date
de relatiile (1.3.41), (1.3.42), (1.3.44) si (1.3.45)
Determinantul lui J poate fi scris sub forma :
![]() .
.
Singularitatile Jacobianului, setul valorile singulare ale variabilelor generalizate sunt date de :
![]() (1.3.46)
(1.3.46)
si pot fi separate în doua seturi distincte.
Setul de valorilor generalizate singulare pentru pozitie
![]() (1.3.47)
(1.3.47)
si setul de valorilor generalizate singulare pentru orientare
![]() (1.3.48)
(1.3.48)
Deoarece JP depinde doar de primele trei valori generalizate, setul valorilor singulare de pozitionare va depinde doar de q1 q2 q3, iar setul valorilor singulare de orientare va depinde doar de q4 q5 q6
În concluzie, conditia suplimentara de manipulator sferic, ne permite sa separam complet singularitatile de pozitionare si de orientare, care pot fi determinate si evaluate independent.
Inversa matricii Jacobian este
 (1.3.49)
(1.3.49)
unde ![]() daca avem
simultan conditiile
daca avem
simultan conditiile  .
.
În acest caz determinarea valorilor generalizate în functie de valorile carteziene se poate face de asemenea separat.
Pentru pozitionare avem :
 (1.3.50)
(1.3.50)
si pentru orientare
 (1.3.51)
(1.3.51)
Relatiile cinematice directe pentru acceleratiile de pozitionare sunt
 (1.3.52)
(1.3.52)
Relatiile cinematice inverse pentru acceleratiile de pozitionare sunt
 (1.3.53)
(1.3.53)
Relatiile cinematice directe pentru acceleratiile de orientare sunt
 (1.3.54)
(1.3.54)
Relatiile cinematice directe pentru acceleratiile de orientare sunt
 (1.3.55)
(1.3.55)
Vom începe prin calculul Jacobianului de pozitionare JP,, care se poate gasi prin derivarea ecuatiilor obtinute în urma modelului geometric direct.
 (1.3.56)
(1.3.56)
Diferentierea directa a relatiei (1.3.56) conduce la urmatoarea relatie
 (1.3.57)
(1.3.57)
Se
calculeaza determinantul lui JP pentru a gasi pozitiile
degenerate, asociate cu interiorul spatiului de lucru. Calculam mai întai
ca ![]() (1.3.58) astfel încât setul singular al
pozitiilor este determinat de doua situatii:
(1.3.58) astfel încât setul singular al
pozitiilor este determinat de doua situatii:
![]() sau
sau ![]() deoarece q3
nu poate atinge
deoarece q3
nu poate atinge ![]() (1.3.59)
(1.3.59)
si
![]() (1.3.60)
(1.3.60)
Primul
caz (relatia (1.3.59)) corespunde unei pozitii degenerate când
bratele sunt complet extinse. Cel de-al doilea caz (relatia (1.3.60))
corespunde situatiei ilustrate în figura nr 5, unde s-a realizat
proiectia bratelelor 2 si 3 pe planul
în cazul în care avem egalitatea![]() . În figura 1.3.5 termenul
. În figura 1.3.5 termenul ![]() si termenul
si termenul ![]() reprezinta
proiectia punctului O3 pe axa x1.
reprezinta
proiectia punctului O3 pe axa x1.

 (1.3.61)
(1.3.61)
|
|
Figura 1.3.5
În continuare vom face calculele pentru partea de orientare.
Prima
observatie este ca pentru robotul PUMA  si deci
si deci
 si
si  .
.
Folosind acesti vectori obtinem
 (1.3.62)
(1.3.62)
cu ![]() . De aici se poate trage concluzia ca singura orientare
degenerata, care corespunde unei singularitati a Jacobianului, este
data de setul singular de valori singulare pentru orientare, adica de
relatia sinq5=0
sau q5=0 ,
deoarece q5
nu poate atinge 180 .
Aceasta conditie corespunde cazului când z4 si z6
se aliniaza. De asemenea când efectorul este într-o asemenea orientare
degenerata, ambele unghiuri q4 si q6 produc aceeasi
miscare de rotatie, astfel un grad de libertate pentru rotatie
s-a pierdut.
. De aici se poate trage concluzia ca singura orientare
degenerata, care corespunde unei singularitati a Jacobianului, este
data de setul singular de valori singulare pentru orientare, adica de
relatia sinq5=0
sau q5=0 ,
deoarece q5
nu poate atinge 180 .
Aceasta conditie corespunde cazului când z4 si z6
se aliniaza. De asemenea când efectorul este într-o asemenea orientare
degenerata, ambele unghiuri q4 si q6 produc aceeasi
miscare de rotatie, astfel un grad de libertate pentru rotatie
s-a pierdut.
În continuare observam ca
 (1.3.63)
(1.3.63)
si de asemenea
 (1.3.64)
(1.3.64)
Pâna
acum am calculat ![]() relatia (1.3.61)
si folosind relatiile (1.3.63) si (1.3.64) obtinem
relatia (1.3.61)
si folosind relatiile (1.3.63) si (1.3.64) obtinem
![]() (1.3.65)
(1.3.65)
astfel
încât singurul termen care mai trebuie calculat este : ![]()
 ,
,  ,
,  si deci
si deci
 (1.3.66)
(1.3.66)
Determinarea lui J si respectiv J-1 pentru robotul PUMA este acum completa, folosind relatiile (1.3.61), (1.3.65) si (1.3.66).
Pentru a
determina directiile carteziene de constrângere avem ![]() si
si ![]() , de unde avem
, de unde avem ![]() , adica
, adica  .
.
Conditiile
de constrângere a miscarii care sunt date de  , ne conduce la urmatoarea relatie
, ne conduce la urmatoarea relatie ![]() (1.3.67)
(1.3.67)
De aceea
când ![]() si
si ![]() realtia (1.3.67) conduce
la
realtia (1.3.67) conduce
la
c23=s1=s4=0
adica ![]() (1.3.68) .Relatia
(1.3.68) înseamna ca miscarea unghiulara a originii efectorului
(adica a sistemului 6 de coordonate) în jurul axei de baza z, adica
axei z0 este imposibila.
(1.3.68) .Relatia
(1.3.68) înseamna ca miscarea unghiulara a originii efectorului
(adica a sistemului 6 de coordonate) în jurul axei de baza z, adica
axei z0 este imposibila.
1. Consideram robotul planar având trei articulatii de rotatie (figura 1.3.6) si lungimea bratelelor respectiv d, h, si bratul trei de lungime 0 (a efectorului).
(a) Determinati grafic ecuatiile cinematice directe asociate cu acest manipulator, adica valorile px, py si a ca functii de q1 q2 q3
(b) Diferentiati cele trei ecuatii obtinute la punctul (a) în scopul obtinerii Jacobianului J (3x3).
(c) Determinati J si J-1.
|
|
(d) Identificati toate configuratiile degenerate asociate cu acest tip de manipulator.
Figura 1.3.6
2.
Determinati explicit matricea (3x3) Jacobian de orientare pentru robotul
Microbot, notata cu ![]() si
identificati setul singular al valorilor generalizate, adica valorile
lui q1 q2 q3
pentru care
si
identificati setul singular al valorilor generalizate, adica valorile
lui q1 q2 q3
pentru care ![]() =0.
Discutati semnificatia rezultatelor obtinute vis a vis de abilitatea de a
obtine orientari dorite, arbitrare ale efectorului.
=0.
Discutati semnificatia rezultatelor obtinute vis a vis de abilitatea de a
obtine orientari dorite, arbitrare ale efectorului.
3. Determinati explicit directiile de constrângere carteziene asociate robotului Puma când q3=-90 si q1 q2=0 . Schitati o vedere de sus a robotului în aceasta pozitie degenerata si verificati grafic rezultatele obtinute.
4. Scrieti expresia întregului Jacobian (6x6) asociat tipului de robot Standford.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 276
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved