| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
MANIABILITATEA SI STABILITATEA AUTOMOBILULUI
In procesul de conducere a unui automobil se urmareste obtinerea unei anumite miscari a acestuia. Automobilul in miscare trebuie sa se mentina pe traiectoria impusa si sa fie stabil pe roti in limitele permise de aderenta si de inclinarea caii de rulare.
Capacitatea automobilului de a urma exact traieotoria imprimata prin virare si de a conserva mersul rectiliniu se numeste maniabilitatea.
Pentru a determina o anumita miscare, conducatorul automobilului actioneaza asupra sistemului de directie, sistemului de propulsie si sistemului de frinare prin comenzi specifice.
Cind miscarea automobilului difera de cea dorita, conducatorul este obligat sa efectueze o corectie. Asa cum se obsarva in figura 1 conducatorul impreuna cu automobilul alcatuiesc in procesul conducerii un sistem inchis cu reactie inversa, de comanda si reglare.

Fig. 1. Schema legaturilor in sistemul conducator-autovehicul

Caracteristicile automobilului care influenteaza maniabilitatea sunt cele exprimate prin reactia la comenzi si perturbatii asa cum se poate vedea in figura 2. Dintre acestea nemijlocit legata de maniabilitate este reactia la comenzile aplicate asupra sistemului de directie.
Prin stabilitatea automobilului se intelege capacitatea acestuia de a se opune alunecarii, patinarii, deraparii si rasturnarii in plan longitudinal sau transversal,
Maniabilitatea si stabilitatea sunt calitati de mare importanta pentru siguranta circulatiei. Ele sunt calitati interdependente fiind influentate de aceiasi factori: repartizarea statica si dinamica a sarcinii pe roti, aderenta si elasticitatea pneurilor, caracteristicile constructive ale automobliului, starea si inclinarea caii de rulare, viteza de deplasare, etc.
Maniabilitatea automobilului in viraj si la mersul rectiliniu
Pentru ca automobilul sa se deplaseze in directia comandata de conducator este necesar ca fortele laterale necesare acestui regim sa poata fi efectiv realizate, deci trebuie ca ele sa nu depaseasca aderenta. Daca rotile directoare au ajuns la limita de aderenta, oricit s-ar actiona prin bracarea, directia au- tomobilulul nu mai poate fi schimbata, acesta devenind nemaniabil.
|
|
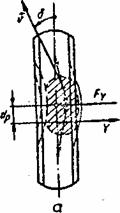
In figura 3 se prezinta schema de viraj a unui automobil ce se deplaseaza pe un drum orizontal. Fiecare din axele celor doua roti de directie actioneaza asupra butucului rotii cu o forta de impingere F, paralela la planul de simetrie al automobilului care poate fi descompusa in doua componente: una in planul roti cealalta perpendiculara pe aceasta.
In mod conventional se considera ca, la inceputul virajului cele doua roti sunt bracate cu unghiuri egale(θe = θi = θ), astfel incat fortele la cele doua roti vor fi egale:
Fx = F cosθ; Fy
= F sinθ (1)
Fx tinde sa provoace rularea, opunandu-se
rezistenta la rulare Xl iar Fy tinde s provoace deraparea laterala, opunandu-se reactiunea transversala a caii de rulare Y1.
Conditia ca roata directoare sa ruleze fara patinare in directia deplasarii este:
F cos ≥ X1 (2)
iar conditia ca roata sa nu derapeze in directia transversala:
F sin ≤ Y1 (3)
rezultand conditia de maniabilitate a autovehicolului:
Fx tg ≤ Y1 (4)
sau inlocuind X1 = f Z1 si Y1 = Z1, se obtine:
f tg (5)
Valoarea coeficientului de aderenta φ pe drumuri uscate si tari fiind de citeva ori mai mare decat valoarea coeficientului de rezistenta la rulare, iar valoarea unghiului de bracare maxim θmax < 45(tg > 1) rezulta
ca in eceste conditii relatia (5) este intotdeauna satisfacuta.
La deplasare pe drumuri deformabile si alunecoase sau in timpul frinarilor intense conditia nu mai poate fi indeplinita deoarece coeficientul de rezistenta la rulare creste cu efect asupra pierderii maniabilitatii.
Sub acest aspect se poate face observatia ca automobilele cu tractiunea in fata sunt mai maniabile decit cele cu tractiunea in spate. La cele cu tractiunea in fata fortele F actioneaza intotdeauna in planul rotii, componenta F fiind zero.
Deplasarea automobilului pe o traiectorie curbilinie, fara alunecari si patinari impune ca toate rotile sa ruleze pe traiectorii concentrice in jurul aceluiasi centru de virare, numit centru instantaneu al virajului.
|
|
In cazul unui automobil cu patru roti si punte directoare fata (fig 4), centrul instantaneu al virajului 0 se gaseste la intersectia prelungirii axei puntii spate cu prelungirea axelor rotilor directoare. Rezulta ca pentru a efctua un viraj corect este necesar ca unghiurile de bracare la cele doua roti sa fie diferite si anume Qi > Qe . Corform figurii 4 din triunghiurile OAD si OBC se poate scrie:
![]()
![]() (6)
(6)
sau prin scadere:
![]()
 (7)
(7)
unde: L - ampatamentul, b - distanta dintre axele pivotilor
Relatia 7 reprezinta conditia virarii geometrice, cunosouta si sub denumirea de conditia Ackermann. Ea stabileste raportul care trebuie sa existe intre cele doua unghiuri de bracare in conditiile executarii corecte a
virajului mentinerii directiei in curba. Relatia are un caracter pur geometric deoarece nu tine cont de aspectele dinamice ale deplasarii in curba.
Mecanismul de directie clasic, cu paralelogram deformabil, nu satisface exact conditia mentinerii directiei in viraj data de relatia (7). Cu toate acestea, daca alegerea elementelor trapezului de directie se face functie de unghiurile cele mai des utilizate in virajul autovehiculului, rezultatele vor fi satisfacatoare. In fgura 5 sunt prezentate curbele dependentei teoretice (relatia 7) si reale dintre unghiurile de bracare ale rotilor directoare.
Se observa ca la unghiuri de bracare mici (raze de viraj mari), dependenta reala este foarte apropiata de cea teoretica, iar la unghiuri de bracare mari (raze de viraj mici), diferentele dintre cele doua dependente sint mai mari, de unde rezulta ca virajul are loc cu alunecari transversale.
|
|
Avind in vedere ca in aceste situatii automobilul se deplaseaza cu viteze mici si ca pneu- rile permit o deformare tranaversala, efectul fenomenului este atenuat.
In cele expuse pina aici s-a neglijat elasticitatea transversala a pneurilor care in rea- litate exista si influenteaza asupra traiectoriei rotilor in viraj sau la mersul rectiliniu.
|
Fig. 5 Dependenta teoretica si reala dintre unghiurile de inclinare a rotilor de directie |
Daca asupra rotii autovehiculului actioneaza o forta traneversala Fy determinata de forta centrifuga, de vintul lateral sau de inclinarea transversala a caii de rulare, roata isi va modifica traiectoria initiala. Fata de roata rigida (nedeformabila) la cere traiectoria centrului este permanent continuta in planul median, rotile precazute cu pneuri elastice, sub actiunea fortei transversale vor rula conform
|
|
schemelor prezentate in figura 6.

Fig. 6 Schema rularii rotii cu deviere laterala
Daca
forta transversala Fy este mai mica decit forta
de aderenta a rotii ( ![]() ) pneul nu poate derapa ci va fi deformat puternic in zona de
contact cu solul. Ca rezultat pneul intra in contact cu drumul cu o
inclinare oarecare fata de planul median al rotii (fig. 6 a),
iar rularea este caracterizata de unghiul δ numit unghi de deviere laterala al
pneului.
) pneul nu poate derapa ci va fi deformat puternic in zona de
contact cu solul. Ca rezultat pneul intra in contact cu drumul cu o
inclinare oarecare fata de planul median al rotii (fig. 6 a),
iar rularea este caracterizata de unghiul δ numit unghi de deviere laterala al
pneului.
In figura 6 b, fenomenul este pus in evidenta prin marcarea pe cir- cumferinta pneului a unor puncte (A B C D) urmand amprenta acestora in cazul rularii sub actiunea fortei Fy . Se constata ca amprentele (A1,B1,C1,D1) determina o traiectorie ce se abate fata de directia paralela cu planul median al rotii cu unghiul de deviere.
Unghiul de deviere laterala al pneului δ depinde de marimea fortelor transversale, normale, tangentiale si de elasticitate transversala a pneului.
Pentru o anumita incarcare radiala a rotii unghiul δ creste la inceput aproximativ proportional cu forta laterala Fy, adica:
Fy=K (8)
dar apoi cresterea este tot mai
accentuata pina cind se atinge valoarea fortei de
aderenta ( ![]() ), moment in care se produce deraparea. In relatia (8),
K este denumit coeficient de
rezistenta al pneului la
deviere laterala. Valoarea lui depinde de: incarcarea radiala a roti GR,
presiunea din pneu, valoarea reactiunii tangentiale si de
dimensiunile pneului. In general K=30 -
75 daN/grad pentru autoturisme si K=50-150 daN/grad pentru autocamioane si autobuze. Valoarea maxima a
unghiului de deviere laterala este 12 - 18 dupa care se produce
deraparea.
), moment in care se produce deraparea. In relatia (8),
K este denumit coeficient de
rezistenta al pneului la
deviere laterala. Valoarea lui depinde de: incarcarea radiala a roti GR,
presiunea din pneu, valoarea reactiunii tangentiale si de
dimensiunile pneului. In general K=30 -
75 daN/grad pentru autoturisme si K=50-150 daN/grad pentru autocamioane si autobuze. Valoarea maxima a
unghiului de deviere laterala este 12 - 18 dupa care se produce
deraparea.
Devierea laterala a penurilor influenteaza puternic maniabilitatea atit la deplasarea in curba cit si la deplasarea rectilinie.
1.1. Maniabilitatea automobilului in viraj
Se analizeaza influeata elasticitatii laterale a pneurilor asupra maniabilitatii in viraj a automobilului singular si a autotrenurilor.
Automobilul singular.
In figura 7 se prezinta schema teoretica de viraj, situatie in care toate rotile descriu cercuri concentrice cu centrul in punctul 0.
|
|
Vlrajul automobilului este caracterizat in
acest caz de raza de viraj R determinata de traiectoria
punctului B din centrul pun-
tii spate.
Din triunghiul OAB se poate scrie:
![]() (9)
(9)
unde: θ - unghiul mediu de bracare
![]()
|
Fig. 7. Schema virajului automobilului singular cu devierea laterala a rotilor |
Aria generata de automobil in timpul deplasarii se numeste fisie de gabarit. In cazul virajului, latimea fisiei de gabarit (Bg ) este determinata de diferetita dintre raza de viraj exterioara Re si raza de viraj interioara Ri:
|
|
![]()
![]() (10)
(10)
adica:
![]() (11)
(11)
Forma si dimensiunile fasiei de gabarit caracterizeaza calitatile de maniabilitate ale automobilului si determina forma si dimensiunile drumurilor. In realitate latimea de gabarit are valori mai mari ca efect a oscilatiilor transversale permanente la care este supus automobilul.
Considerand ca miscarea are loc pe un drum orizontal, fara vant lateral forta laterala care actioneaza asupra automobilului va fi prezentata de forta de inertie Fiy aplicata in centrul de greutatate. Reactiunile provocate de aceasta forta la cele doua punti determina devierea laterala a pneurilor caracterizata de unghiurile δ1 si δ2.
Ca efect, automobilul
isi va modifica traiectoria. Noua traiectorie este determinata de directia de miscare a
centrelor celor doua punti (![]() si
si ![]() ). Vectorul vitezei
punctului
). Vectorul vitezei
punctului ![]() a puntii din fata (ale carei roti
sunt bracate cu unghiul mediu θ), va deveni inclinat cu unghiul θ -
δ1 , iar vectorul, vitezei punctulul B din centrul puntii
spate
a puntii din fata (ale carei roti
sunt bracate cu unghiul mediu θ), va deveni inclinat cu unghiul θ -
δ1 , iar vectorul, vitezei punctulul B din centrul puntii
spate ![]() va fi inclinat cu
unghiul δ1 fata de planul longitudinal al
automobilulul. Ca rezultat centrul instantaneu al virajului se va deplasa din punctul 0 in punctul 0δ
, numit centrul real al virajului, determinat de intersectia
perpendicularelor duse la vectorii
va fi inclinat cu
unghiul δ1 fata de planul longitudinal al
automobilulul. Ca rezultat centrul instantaneu al virajului se va deplasa din punctul 0 in punctul 0δ
, numit centrul real al virajului, determinat de intersectia
perpendicularelor duse la vectorii ![]() si
si ![]() in A si B.
Distanta dintre centrul real al virajului 0δ si
planul longitudinal de simetrie se numeste raza de viraj reala, se
noteaza cu Rδ , si caracterizeaza virajul real
efectuat de automobil.
in A si B.
Distanta dintre centrul real al virajului 0δ si
planul longitudinal de simetrie se numeste raza de viraj reala, se
noteaza cu Rδ , si caracterizeaza virajul real
efectuat de automobil.
Din triunghiurile dreptunghice Oδ EA si Oδ eB rezulta:
![]()
![]()
![]() (12)
(12)
Prin adunare si tinand cont ca AE + BE = L rezulta ca:
![]() (13)
(13)
sau pentru unghiuri de bracare si deviere mici:
![]() (14)
(14)
Rezulta ca in cazul real al pneurilor cu elasticitate laterala spre deosebire de virajul teoretic, cu roti rigide, raza de viraj reala Rδ este functie de unghiurile de deviere laterala δ1 si δ2 ale rotilor celor doua punti.
Functie de raportul existent intre δ1 si δ2 pot apare trei cazuri distincte:
a) Daca δ1 si δ2, raza de viraj reala este mai mica decit raza de viraj teoretica a automobilului cu roti rigide (Rδ < R), iar automobilul este caracterizat de o capacitate de viraj excesiva. Adica, pentru acelasi unghi de bracare raza reala de virare va fi mai mica.
b) Daca δ1 δ2 , raza de viraj reala este egala cu raza de viraj teoretica (Rδ R), iar capacitatea de viraj a automobilului este indiferenta.
c) Daca δ1 > δ2 , raza de viraj reala Rδ este mai mare decit raza de viraj teoretica (Rδ > R), iar automobilul are o capacitate de viraj insuficienta, adica pentru acelasi unghi de bracare raza reala de virare va fi mai mare.
O interpretare grafica a celor trei cazuri este prezentata in figura 8.
|
|
Deoarece capacitatea de viraj indiferenta (δ1 δ2) este greu de realizat practic, constructorii urmaresc obtinerea capaciatii de viraj insuficiente (δ1> δ2; Rδ > R) care se dovedeste a fi mai avantajoasa decit capacitatea de viraj excesiva (δ1 < δ2 ; Rδ < R).
In cazul capacitatii de viraj insuficiente (automobil subvirator) maniabilitatea si stabilitatea se imbunatatesc, conducatorul putind controla usor traiectoria impusa printr-o corectie suplimentara la volan aplicata in sensul virajului. De asemenea in cazul unui vint lateral, automobilul subvirator are tendinta de a pastra automat miscarea rectilinie.
La autocamioane si autobuze capacitatea subviratoare este indeplinita de la sine datorita prezentei pneurilor duble la puntea spate, cu efect asupra maririi coeficientului total de rezistenta la deviere laterla. La autoturisme, conditia se realizeaza prin amplasarea corespunzatoare a centrului de greutate.
La o exploatare nerationala (incarcatura asezata necorespunzator, presiune in pneuri diferita de cea prescrisa, viteza excesiva), capacitatea de viraj a automobilului se poate modifca cu efect asupra scaderii maniabilitatii
In fgura 9 se prezinta schema de viraj a unui autotren cu semiremorca. Si in acest caz, pentru ca virajul sa aiba loc fara alunecari ale pneu-
L

Fig. 9. Schema virajului autotrenului cu devierea laterala a rotilor
urilor este necesar ca toate rotile sa se deplaseze pe traiectorii concetrice cu centrul in punctul O.
Virajul in acest caz va fi caracterizat de raza R descrisa de centrul puntii spate a autotractorului si raza R1 descrisa de centrul puntii spate a semiremorcii.Neglijind unghiul α (respectiv cota c) ca avand valori mici, se poate scrie:
![]()
![]() (15)
(15)
unde L1 - ampatamentul semiremorcii,θ1 - unghiul de fringere al autotrenului.
Latimea fasiei de gabarit (Bg se determina in acest caz ca diferenta dintre raza de viraj exterioara a autotractorului (Re) si raza de viraj interioara determinata de semiremorca (R1):
![]() ;
;![]() (16)
(16)
Rezulta:
![]() (17)
(17)
|
|
Latimea fisiei de gabarit a autotrenului cu seiremorca depinde de unghiurile θe si θ1 , dependenta dintre ele fiind data de ecuatia miscarii in curba.
Se constata ca latimea fisiei de gabarit a unui autotren cu semiremorca este mai mare decit a unui automobil singular, dar mai mica decit cea a unui autotren, cu remorca,adica autotrenurile cu semiremorca sint mai maniabile decit cele cu remorca.
Pentru imbunatatirea calitatilor de maniabilitate ale autotrenurilor se poate utiliza solutia ca si rotile semiremorcii sau remorcii sa fie directoare. Astfel latimea fisiei de gabarit devine aproximativ egala cu cea a automobilului singular.
Tinind cont de elasticitatea transversala a pneurilor se constata ca si autotrenul din figura 9 isi modifica traiectoria. Traiectoria reala va fi determinata de valoarea unghiurilor de deviere laterala ale pneurilor celor trei punti (δ1, δ2, δ3,) determinata de valoarea fortelor de inertie tranaversale Fiy si Fiyl apicate in centrul de greutate al autotractorului si semiremorcii.
Centrul real al virajului 0δ se va gasi la
intersectia perpendicularelor duse la vectorii![]() ,
, ![]() si
si![]() .
.
Distanta
de la 0δ la axa longitudinala a autotractorului si
semiremorcii determina razele de viraj Rδ si ![]() ale autotractorului si semiremorcii.
ale autotractorului si semiremorcii.
![]() ;
; ![]() (18)
(18)
sau pentru valori mici ale unghiurilor de bracare si deviere laterala a penurilor:
![]()
![]() (19)
(19)
Aprecierea capacitatii de viraj a semiremorcii se face functie de raportul dintre valoarea unghiului δ2 si δ3 putind exista urmatoarele trei posibilitati:
a)Daca δ2
< δ3 , raza de viraj a semirermorcii ![]() < R1, este mai mica
decit raza de viraj
< R1, este mai mica
decit raza de viraj
teoretica a
semiremorcii cu rotii rigide (![]() < R1) iar capacitatea de viraj a semiremorcii
va fi excesiva.
< R1) iar capacitatea de viraj a semiremorcii
va fi excesiva.
b) Daca δ2 = δ3 , razele de viraj ale semiremorcii cu roti elastice si rigide vor fi egale
(![]() = R1), iar semiremorca va avea o capacitate de
viraj indiferenta.
= R1), iar semiremorca va avea o capacitate de
viraj indiferenta.
c) Daca δ2 > δ3
, raza de viraj reala a semiremorcii este mai mare decit cea
teoretica (![]() > R1), iar capacitatea de viraj a
acesteia va fi insuficienta.
> R1), iar capacitatea de viraj a
acesteia va fi insuficienta.
Pentru o anumita capacitate de viraj a autotractorului, capacitatea de viraj a semiremorcii poate influenta capacitatea intregului autotren. Astfel, pentru o capacitate de viraj insuficienta sau indiferenta a autotractorului, capacitatea de viraj excesiva a semiremorcii poate influenta negativ maniabilitatea si stabilitatea intregului autotren, la o anumita viteza putind interveni deraparea.
Pentru o cit mai buna maniabilitate si stabilitate a autotrenului cu semiremorca ar trebui indeplinite in ordine, una din urmatoarele conditii:
a) δ1 > δ2 si δ2 > δ3 - capacitatea de viraj insuficienta atat pentru autotractor cit si pentru semiremorca.
b) δ1 > δ2 si δ2 = δ3 - capacitatea de viraj insuflcienta pentru autotractor si capacitate de viraj indiferenta pentru semiremorca.
c) δ1 = δ2 = δ3 - capacitatea de viraj indiferenta pentru autotractor si semiremorca.
Conditiile pot fi realizate prin masuri constructive constind din:
o anumita pozitie a centrului de greutate pentru autotractor si semiremorca,o rigiditate corespunzatoare a pneurilor, o anumita amplasare a punctului de articulare dintre autotractor si semiremorca etc. sau prin masuri de exploatare: respectarea presiunii din pneuri, asezarea corecta a incarcaturii, respectarea vitezei de deplasare, etc.
1.2. Maniabilitatea automobilului la deplasarea rectilinie
Fenomenul de deviere al pneurilor provocat de o forta laterala (vint lateral sau inclinarea transvereala a caii de rulare) se manifesta si asupra automobilului aflat in deplasare rectilinie. Efectul se traduce prin tendinta automobilului de a parasi traiectoria rectilinie si de a intra in viraj. Comporta-rea in acest caz este determinata de capacitatea sa de virare, iar mentinerea directiei de mers se realizeaza prin corectii suplimentare aplicate la volan.
Schema unui automobil aflat in miscare rectilinie este reprezentata in figura 10. Asupra automobilului actioneaza forta vintului FV a carei componenta transversala FVY provoaca devierea pneurilor cu unghiurile δ1 si respectiv δ2 .
Punctul de aplicare al fortei al vantului CV se numeste metacentru.Pozitia metacentrului difera de cea a centrului de greutate fiind determinata de dimensiunile si forma longitudinala a automobi-lului, de directia si viteza vintului, de viteza atomobilului.
Ca urmare a fortei transversale, in punctul de contact al rotilor cu solul iau nastere reactiunile transversale Y1 si Y2 .
Punctul in care ar trebui sa se gaseasca metacentrul CV pentru ca unghiurile de deviere laterala δ1 si δ2 sa fie egale se numeste centrul reactiunilor transversale si se noteaza cu Cδ . Coordonatele longitudinale l1 si l2 ale acestui punct se determina din conditia
Conditia de echilibru a automobilului in raport cu centrul reactiunilor transversale Cδ este :
Y1l1=Y2l2 (20)
Conform relatiei (8) se cunoaste:
Fy=Kδ=Y (21)
sau:
![]()
unde K - coeficientul de rezistenta al pneului la deviere laterala.
Cunoscand ca , rezulta :
![]() (22)
(22)
Din relatiile (20) si (22), cunoscand ca l1+l2=L, se pot determina coordonatele centrului reactiunilor transversale:
![]() ;
; ![]() (23)
(23)
Actiunea vantului lateral asupra maniabilitatii si stabilitptii automobilului la deplasarea rectilinie se poate analiza functie de pozitia relativa dintre punctele CV si Cδ , putand exista urmatoarele situatii:
a) Metacentrul CV coincide cu centrul reactiunilor transversale Cδ
- in acest caz (fig. 11) unghiurile de deviere laterale ale pneurilor celor doua punti sunt egale , deci automobilul are o capacitate de viraj indiferenta, iar reactia lui se manifesta prin parasirea traiectoriei rectilinii initiale si deplasarea pe o traiectorie rectilinie ce face un unghi fata de traiectoria initiala. Pentru a mentine directia initiala
conducatorul este obligat sa roteasca volanul in sens opus fortei FVY astfel incit axa longitudinala a automobilului sa faca un unghi δ cu axa drumului. La incetarea fortei perturbatoare volanul trebuie readus in pozitie neutra.
b) Metacentrul CV se afla in spatele centrului reactiunilor transversale Cδ .
Ca efect, δ1 < δ2 , deci automobilul are o capacitate de viraj excesiva.
Sub actiunea fortei transversale automobilul paraseste traiectoria rectilinie intrind in virat.
Fig.11, fig.12
Centrul instantaneu al virajului se afl la intersectia perpendicularelor
la vectorii ![]() si
si ![]() duse in centrul celor doua punti, (fig. 12). Datorita
deplasarii curbilinii apare si forta transversala de
inertie FIY aplicata in centrul de greutate C, avind
acelas sens cu Fvy si contribuind la accentuarea devierii
laterale a pneurilor. Functie de pozitia centrului de greutate,
forta FIY poate modfica raportul dintre δ1 si
δ2 . Pentru a pastra traiectoria initiala,
conducatorul trebuie sa roteasca volanul spre partea opusa
centrului virajului.
duse in centrul celor doua punti, (fig. 12). Datorita
deplasarii curbilinii apare si forta transversala de
inertie FIY aplicata in centrul de greutate C, avind
acelas sens cu Fvy si contribuind la accentuarea devierii
laterale a pneurilor. Functie de pozitia centrului de greutate,
forta FIY poate modfica raportul dintre δ1 si
δ2 . Pentru a pastra traiectoria initiala,
conducatorul trebuie sa roteasca volanul spre partea opusa
centrului virajului.
La marirea vitezei, se mareste si forta FIY , raza de viraj scade, iar miscarea devine din ce in ce mai putin stabila, urmind ca la o anumita viteza numia viteza critica automobilul sa derapeze
c)Metaceatrul CV se afla in fata centrului reactiunilor laterale C
Ca efect, δ1 > δ2 , deci automobilul are o capacitate de viraj insuficienta. In acest caz (fig. 13), automobilul inceteaza deplasarea rectilinie si intra in viraj dar in sens invers decit in cazul precedent.
Forta de inertie ce ia nastere este in acest caz de sens contrar fortei Fvy , si are tendinta de a micsora unghiurile de deviere laterala sau poate provoca deplasarea lor de cealalta parte a axei longitudinale, situatie in care se schimba si sensul de virare. Pentru a pastra traiectoria initiala, conducatorul trebuie sa roteasca volanul spre partea opusa centrului virajului.
Daca centrul de greutate C nu coincide cu metacentrul CV , atunci fortele Fiy si Fvy dau nastere la un moment de intoarcere a carui marime si directie depinde de pozitiile reciproce ale punctelor C si CV.
![]()
|
|
Situatia cea mai periculoasa epare atunci cand metacentrul Cv se afla in fata centrului de greutate C, deoarece momentul de intoarcere are acelasi sens cu rotirea automobilului ceea ce duce la pierderea stabilitatii.
|
Fig. 13. |
Pentru reducerea instabilitatii si pastrarea unei capacitati de viraj corespunzatoare la viteze mari, indiferent de perturbatiile laterale, se urmareste ca metacentrul sa fie dispus cit mai in spate pentru a se suprapune cu centrul de greutate al automobilului sau cu centrul reactiunilor transversale. Acest lucru se poate obtine prin studiul formei longitudinale a caroseriei.
Analizand maniabilitatea automobilului la deplasare in viraj sau rectilinie se constata ca pentru ca maniabilitatea si stabilitatea sa fie crespunzatoare este necesar ca automobilele sa aiba o capacitate de viraj insuficienta.
Cu toate acestea, capacitatea de viraj insuficienta trebuie limitata pentru a nu provoca instabilitate aerodinamica, a nu necesita marirea unghiurilor de actionare a volanului sau marirea rezistentei la rulare si uzura pneurilor. In acest sens se recomanda ca diferenta δ1- δ2 sa nu fie mai mare de 1- 20
2. Stabilitatea longitudinala si transversala a automobilului
Stabilitatea este una din proprietatile importante ale automobilului.
In anumite conditii deplasarea automobilului poate deveni instabila in directie longitudinala sau transversala. Pierderea stabilitatii longitudinale se poate manifesta sub forma deraparii longitudinale sau a rasturnarii in raport cu una din punti. Pierderea stabilitatii transversale poate provoca deraparea transversala sau rasturnarea laterala.
2.1. Stabilitatea longitudinala
Prin stabilitate longitudinala se intelege capacitatea automobilului de a se opune alunecarii si patinarii longitudinale sau rasturnarii in raport cu o axa tranaversala. Pierderea stabilltatii longitudinale se manifesta la urcarea sau coborirea pantelor, in ttmpul demarajului a franarii precum si la deplasarea pe un drum orizoatal cu viteza foarte mare.
In figura 14 se considera cazul unui automobil cu doua punti care se deplaseaza pe un drum caracterizat de panta α. La urcarea pantei reactiunea normala la puntea fata se micsoreaza. La limita, functie de unghiul α si de
|
|
regimul de miscare aceasta reactiune se poate anula, rotile puntii fata isi pierd contactul cu drumul producandu-se rasturnarea longitudinala in jurul unei axe transversale. In regim de tractiune, sub actiunea momentului motor, rotile tind sa se roteasca in sensul urcarii pantei, in timp ce automobilul sub efectul rnomentului de reactiune se va roti in jurul puntii spate rasturnandu-se.
Se considera ca automobilul se deplaseaza cu o miscare accelerata pe un drum de calitate buna, putindu-se neglija rezistenta la rulare. In acest caz suma momentelor fortelor in raport cu punctul de ras-
turnare B va fi :
Flg
![]() (24)
(24)
Cosiderand la limita de rasturnare Z1=0, rezulta:
![]() (25)
(25)
Avand in vedere ca la urcarea unei rampe mari deci cu viteza redusa: Fd=0, Fa=0, se poate scrie:
![]() (26)
(26)
de unde rezulta valoarea unghiului α la care este posibila rasturnarea, daca nu este precedata de alunecarea longitudinala:
![]() (27)
(27)
Deci conditia de stabilitate la rasturnare pe o rampa longitudinala, fara ca in prealabil sa apara alunecarea este:
![]()
Din conditia de siguranta se impune ca unghiul α la care se produce rasturnarea longitudinala a automobilului sa fie mai mare decat unghiul la care are loc patinarea rotilor motoare.
Se determina astfel conditiile ca rasturnarea sa nu poata fi posibila datorita patinarii rotiior motoare:
- pentru automobilele cu punte motoare fata:
![]() (29)
(29)
- pentru automobile cu punte motoare spate:
 (30)
(30)
- pentru automobile cu ambele punti motoare:
![]() (31)
(31)
Se observa ca in cazul automobilului cu punte motoare fata rasturnarea la urcarea rampei nu este posibila, deoarece, oricare ar fi valoarea coeficientului de aderenta jt inainte de rasturnare apare patinarea rotilor. In cazul automobilelor cu punte motoare spate, sau cu ambele punti motoare, rasturnarea este evitata prin patinarea rotilor, daca este indeplinita conditia:
 (32)
(32)
In mod analog se poate analiza comportarea automobilului la coborarea pantei.
Astfel, conditia de stabilitate la rasturnare la coborarea pantei va fi:
 (33)
(33)
iar conditia ca rasturnarea sa nu fie posibila datorita aparitiei alunecarii rotilor:
 (34)
(34)
Deoarece dstanta a este intotdeauna mai mare decat inaltimea centrului de greutate hg rezulta ca rasturnarea longitudinala a automobilului franat la coborarea pantei nu este posibila deoarece inainte de rasturnare are loc alunecarea longitudinala a rotilor blocate.
La automobilele de foarte mare vteza apare perlcolul de a se rasturna chiar la deplasarea pe drum orizontal.Fenomenul este provocat de rezistenta aerului care descarca foarte mult puntea fata.
Pornind de la relatia (25):
(Ga sin a + Fd + Fa) hg = Ga cos a b
in care se impune:
![]()
rezulta:
Fa hg = Ga b
sau:
![]() (36)
(36)
de unde se poate afla viteza critica la care poate apare rsturnarea longitudinala a automobilului pe un drum orizontal:
 (37)
(37)
In cazul unui autotren cu remorca se constata ca remorca inrautateste
stabilitatea autotrenului la urcarea pantei si o imbunatateste la coborarea ei iar stabilirea longitudinala la patinare a autotrenului nu este influentata de numarul puntilor motoare.
La autotrenurile cu semiremorca se constata influenta diatantei dintre punctul de articulare si axa puntii spate a autotractorului.Astfel, cu cat aceasta distanta (c) este mai mare,cu atat stabilitatea la rasturnare va fi mai buna la urcare,in schmb se inrautateste la coborare.Pe acest considerent se recomanda c = 3oo - 5oo mm.
In conditille uzuale de incercare ale automobilelor, unghiurile limita de rasturnare longitudinale depasesc 35 - 45 pentru autocamioane si 55 - 60 pentru autoturisme, astfel incat chiar pe drumuri foarte bune, conditiile de rasturnare nu sunt satisfacute.
Totusi, in anumite situatii de incarcare cand inaltimea centrului de greutate are valori mari sau pe drumuri accidentate, rasturnarea este posibila.
Patinarea si alunecarea longltudinala se pot produce mai usor indeosebi pe drumuri cu coeficient mic de aderenta.
Stabilitatea transversala
Stabi1irea criteriilor de stabilitate transversala se face pornind de la schema fortelor care actioneaza asupra automobilului aflat in viraj pe un drum cu inclinare transversala (fig.16)
|
Fig. 16 Schema fortelor care actioneaza asupra automobilului in viraj pe un drum cu inclinare transversala |

Rasturnarea transversala a automobilului se va produce in jurul punctului A daca reactiunea normala:
Zs![]() (44)
(44)
sau la limita Zs = 0.
Se scrie suma momentelor fortelor in raport cu punctul de rasturnare A si considerand stabilitatea la limita Zs = 0 se obtine:
![]() (45)
(45)
Rezulta valoarea limita a unghiulul de inclinare transversala a drumului (b) la care, inca nu are loc, dar incepe rasturnarea transversala a automobilulul.

Prin inlocuirea valorii lui Fiy, conform (54o), rezulta:

Cand virajul este executat la viteza constanta si cu o raza constanta, relatia devine:
 (48)
(48)
iar cand deplasarea este rectilinie:
![]() (49)
(49)
adica rasturnarea se produce in jurul punctului B.
Cu ajutorul relatiei (48) se poate determina viteza critica a automobilului aflat in viraj pe un drum cu inclinare transversala b, la care nu are loc dar incepe rasturnarea laterala:
 (50)
(50)
Se constata ca prin marirea unghiului , se mareste viteza limita de rasturnare iar la valoarea
tg = ![]() viteza poate deveni oricat de mare fara ca
rasturnarea sa poata avea loc.
De aceea, inclinarea transversala
cu panta catre exterior se aplica in constructia de drumuri.Cand
virajul are loc pe un drum fara inclinare transversala ( b = 0), viteza oritica de rastrurnare va fi:
viteza poate deveni oricat de mare fara ca
rasturnarea sa poata avea loc.
De aceea, inclinarea transversala
cu panta catre exterior se aplica in constructia de drumuri.Cand
virajul are loc pe un drum fara inclinare transversala ( b = 0), viteza oritica de rastrurnare va fi:
 (51)
(51)
In aceasta situatie rasturnarea tranaversala este posibila daca nu este precedata de deraparea laterala.
Pentru mentinerea stabilitatii transversale la derapare in cazul deplasarii curbilinii a automobilului pe un drum inclinat transversal, conditia mentinerii stabilitatii transversale va fi:
Y1cos q < jz1 - pentru puntea fata (52)
Y2 < jz2 - pentru puntea spate
Z1 si Z2 sunt reactiunile normale la cele doua punti.
Pentru mentinerea stabilitatii, conditiile trebuie indeplinite simultan:
(Y1 cos q + Y2) < j ( Z1 + Z2 ) (53)
Din aceasta relatie se poate obtine in continuare conditia de rulare fara derapare a automobilului
![]() (54)
(54)
Daca in timpul virajului viteza si raza de viraj se
mentin constante rezulta cazul particular:
 (55)
(55)
Unghiul limita de inclinare transversala a drumului la care inca nu are loc dar incepe deraparea va fi:
 (56)
(56)
Daca automobilul se deplaseaza rectiliniu pe un drum cu inclinare transversala, unghiul limita va fi:
tgbd j (57)
Viteza limita a automobilului in viraj pe un drum cu inclinare transversala, la care deraparea inca nu are loc dar incepe, se stabileste cu relatia:
 (58)
(58)
Analizand relatia (58) se observa
ca prin marirea unghiului b se obtine
cresterea vitezei limita de derapare iar la valoarea ![]() viteza poate deveni oricat de mare
fara ca deraparea sa se produca.
viteza poate deveni oricat de mare
fara ca deraparea sa se produca.
Daca virajul se efectueaza pe un drum fara inclinare transversala ( = 0), viteza limita la care incepe deraparea va fi:
![]() (59)
(59)
Deoarece deraparea nu este atat de periculoasa ca rasturnarea transversala, viteza limita de derapare trebuie sa fie mai mica decat viteza limita de rasturnare, deci alunecarea laterala a automobilului trebuie sa se prorduca inaintea rasturnarii transversale:
 (6o)
(6o)
Conditia (6o) necesara pentru siguranta circulatiei poate fi scrisa sub forma:
![]() (61)
(61)
Aceasta conditie este indeplinilta la automobilele normale chiar la valori mari ale coeficientului de aderenta j, motiv pentru care pierderea stabilitatii transversale este caracterizata in mod frecvent de derapare si nu de rasturnare transversala.
9.MANIABILITATEA AUTOVEHICULELOR PE SENILE
9.1.Cinematica virajului autovehiculelor pe senile
Virajul autovehiculelor pe senile se realizeaza cu ajutorul mecanismului de directie ,care ,modifica valoarea monetelor si vitezelor la rotile motoare ale senilelor. In figura 9.1 se prezinta schema unui autovehicul pe senile in viraj si planul vitezelor celor doua senile in timpul virajului .Rotile motoare ale senilei din dreapta si din stanga la viraj se rotesc cu viteze unghiulare diferite, din care cauza cele doua senile vor avea viteze diferite; senila care se deplaseaza cu viteza mai mare intoarce autovehiculul in partea senilei cu o viteza mai mica senilei cu viteza mai mare se daplaseaza in avans si se numeste inaintata,iar senila cu viteza mai mica ramane in urma si se numeste intarziata.
Virajul autovehiculului in jurul centrului (polului) de viraj zero se produce cu viteza unghiulara v a carei valoare, din planul vitezelor ,este data de raportul
. ![]() (9.1)
(9.1)
Unde v' este viteza centrului OA al autovehiculului, adica viteza medie de viraj;R-raza de viraj.
FIGURA 9.1 Schema vorajului autovehiculului pe senile
Rotatia senilei inaintate in jurul centrului O poate fi descompusa in doua miscari :o miscare de rotatie in jurul centrului O2 cu viteza unghiulara v si o miscare rectilinie de translatie cu viteza :
![]()
Unde B este ecartamentul autovehiculului (baza transversala).
Rotatia senilei intarziate in jurul centrului de viraj O se descompune ,de asemenea,in doua miscari: o miscare de rotatie in jurul centrului O1 cu viteza unghiulara v si o miscare rectilinie de translatie cu viteza:
![]()
Viteza medie la viraj are valoarea:
![]()
Intre vitezele autovehiculului exista urmatoarea dependenta:
![]() (9.2.)
(9.2.)
PAG.286
Din figura 9.1 rezulta ca centrele O1 si O2 ale senilelor sunt proiectii ale centrului de viraj pe planele longitudinale de simetrie ale senilelor. Centrul de viraj O este intersectia axei de viraj cu suprafata drumului. Pozitia centrelor de rotatie O1 si O2 indicate in aceasta figura, corespund cazului in care nu exista patinare sau alunecare a senilelor. Patinarea si alunecarea senilelor provoaca o deplasare transversala a punctelor O1 si O2 in raport cu planele longitudinale de simetrie ale senilelor.
In cele ce urmeaza pentru simplificare, se presupune ca nu exista patinare sau alunecare a senilelor in timpul virajului.
9.2. Dinamica autovehiculelor pe senile
9.2.1. Momentul de rezisteta la viraj
In timpul virajului,asa cum s-a mai aratat, autovehiculul pe senile executa concomitent doua miscari de translatie si de rotatie.Solul, ca si suprafata drumului,se opune ambelor miscari.
Rezistenta miscarii de translatie a fost prezentata in capitolul 3.Prin miscarea lor de rotatie, senilele deformeaza si foarfeca solul intr-o directie perpendiculara pe planul longitudinal de simetrie al autovehiculului, dand nastere la reactiuni laterale indreptate in sens opus deplasarii senilelor.Aceste reactiuni se compun din fortele de frecare,rezistentele la deformarea solului, rezistentele la forfecarea solului de catre senile si pintenii lor si la deplasare solului forfecat. In cazul virajului cu viteza mare, consumul de putere pentru cedarea de energie cinetica solului deplasat de catre senile poate avea valori insemnate.
FIGURA 9.2.Schema de stabilire a momentului de rezistenta la viraj
Momentul de rezistenta la viraj ,care va fi notat cu Mr,se determina presupunand ca virajul se realizeaza pe un teren (drum) orizontal in directia indicata de sageata (figura 9.2.) cu o viteza unghiulara constanta, fara forta de tractiune la carlig, neglijand forta centrifuga,iar presiunea specifica pe sol este repartizata uniform.
Presiunea pe sol este raportata la unitatea de lungime a suprafetei de sprijin a senilelor se considera, de asemenea, constanta,adica
![]() (9.3. )
(9.3. )
Unde este greutatea de exploatare a autovehiculului;L-lungimea suprafetei de sprijin a senilelor.
Asupra unei portiuni
elementare dx,a senilei actioneaza sarcina normala
elementara ![]() ,care da nastere reactiunii laterale
elementare
,care da nastere reactiunii laterale
elementare
![]()
in care este coeficientul de rezistenta la viraj, care ia in considerare toate reactiunile laterale ale drumului asupra senilelor in timpul virajului si se considera constant pe toata lungimea suprafetei de sprijin a senilelor.
Reactiunea laterala elementara da in raport cu mijlocul suprafetei
PAG 287
de sprijin momentul elementar
![]()
Momentul de rezistenta la viraj pentru cele doua senile este
Mr=... (9.4)
(9.4)
Valoarea coeficietului de rezistenta la viraj depinde de proprietatile mecanice ale solului, constructia zalelor senilelor si a pintenilor, adancimea de afundare a pintenilor in sol si de alti factori. Corespunzator virajelor cu raza minima ,valoarea coeficientului variaza in limitele de la 0,4 (drum tare de pamant) pana la 0,7(sol afanat)si chiar mai mult. Intr-o masura neinsemnaa,valoarea acestui coeficient depinde de valoarea razei de viraj. In figura 9.3. este indicata ratia coeficientului in functie de raza de viraj,obtinuta experimental pe diferite tipuri de soluri.
FIGURA 9.3.Variatia coeficientului de rzistenta la viraj in functie deraza de viraj,pentru diferite soluri
Din aceasta figura rezulta caci, coeficientul si prin urmare si momentul de rezistenta la viraj Mr creste o data cu micsorarea razei de viraj R.
Pentru scopuri practice ,acest coeficient poate fi determinat cu o precizie suficienta cu relatia :
![]() (9.)
(9.)
in care :c1,c2,c3 sunt coeficienti care depind de proprietatile fizico mecanice ale solului si de parametri constructivi ai autovehiculului (tabelul 9.1)
Din cercetarile
experimentale efectuate a rezultat ca,o variatie mare a
coeficientului de rezistenta la viraj areloc pentru
raze de viraj cuprinse in intervalul ![]() ,pana la R=15.20 m si ca latimea
senilei are influenta redusa asupra valorii acestui coeficient.
,pana la R=15.20 m si ca latimea
senilei are influenta redusa asupra valorii acestui coeficient.
Valoarea coeficientilor c1,c2,c3 Tabelul 9.1.
|
Tipul de sol |
C1 |
C2 |
C3 |
|
Sol arat |
|
|
|
|
Miriste |
|
|
|
|
Teren nedestelenit |
|
|
|
Pe baza unui numar mare de experiente efectuate cu diferite tipuri de autovehicule in diferite conditii de viraj s-a dedus urmatoarea formula empirica pentru determinarea coeficientului de rezistenta la viraj , in functie de raza de viraj:
 (9.6.)
(9.6.)
PAG 288
unde a este o constanta pentru care in calcule se adopta valoarea medie 0,85;R2=raza de viraj a senilei inaintate;B-ecartamentul autovehiculului.
In tabelul 9.2 ,se prezinta valorile maxime ale coeficientului de rezistenta la viraj, max, pentru cateva tipuri de teren(sol).
valori ale coeficientului max tabelul 9.2.
|
Tipul solului(terenului) |
max |
|
Sol argilos cu iarba uscat (umiditate<8%) |
|
|
Drum de pamant uscat,argilo-nisipos |
|
|
Aratura pe sol argilo-nisipos (umiditate<8%) |
|
|
Drum argilos-nisipos umed (umiditat>20%) |
|
|
Zapada afanata |
|
|
Zapada compacta la temperatura de 0oC |
|
Pentru calculul mecanismelor de directie a acestor autovehicule, trebuie sa se aiba in vedere cele mai grele regimuri de exploatare.Aceste regimuri corespund virajului pe un sol uscat inierbat(intelenit)argilo-nisipos.Din punct de vedere al virajului ,toate celelalte soluri ,solicita mai putin mecanismele de directie.
In unele cazuri,valoarea coeficientului de rezistenta la viraj se determina cu relatia:
![]() (9.7)
(9.7)
Unde este valoarea relativa a razei de viraj,definiti prin relatia:
 (9.8)
(9.8)
1,2 fiind indicii razelor de viraj ale senilelor.
Din relatia (9.7) rezulta ca o data cu cresterea razei de viraj,coeficientul si momentul de rezistenta la viraj Mr,se micsoreaza foarte mult.Daca tinde catre infinit, tinde catre zero,ceea ce inseamna ca in cazul miscarii rectilinii ,pentru calculul fortelor tangentiale de tractiune F1 si F2, sunt relatiile 9.20.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 6876
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved