| CATEGORII DOCUMENTE |
| Demografie | Ecologie mediu | Geologie | Hidrologie | Meteorologie |
Tema de proiect
Sa se studieze giroorizontul cu corectie de tip proportional montat pe o platforma fixa fata de Pamant,atingand urmatoarele puncte:
- trasarea caracteristicilor ![]() ,
,
![]() ,
,
![]() ,
cu si fara frecare,neglijand sau nu
,
cu si fara frecare,neglijand sau nu ![]() si
si ![]() ;
;
- se vor considera cazurile ![]() =
= ![]() si
si ![]()
![]()
![]() pentru fiecare din situatiile de mai sus
pentru fiecare din situatiile de mai sus
Valori numerice : ![]() ,
, ![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
I. Chestiuni teoretice
Pentru determinarea vizuala a pozitiei aeronavei in raport cu planul orizontal local, se folosesc echipamente numite giroorizonturi, iar pentru formarea unor semnale electrice proportionale cu unghiurilr de ruliu si de tangaj, se utilizeaza giroverticalurile.
Echipamentele giroscopice de
verticala au in componenta giroscoape astatic rapide in suspensie cardanica
exterioara (GAR). Suspensia cardanica este formata din doua cadre de suspensie,
axa de rotatie proprie (directia vectorului ![]() )
coincizand cu verticala locului.
)
coincizand cu verticala locului.
Formarea indicatiilor cu privire la unghiurile de ruliu si de tangaj se realieaza cu ajutorul unei machete a aeronavei si a unei linii de referinta, numita linia orizontului.
Ecuatiile de miscare ale giroorizontului
Schema cinematica a echipamentului giroscopic
este prezentata in figura 1. Sistemele de coordonate utilizate sunt ![]() - triedrul orizontal legat de traiectoria de
zbor, avand axa
- triedrul orizontal legat de traiectoria de
zbor, avand axa ![]() - tangenta al traiectorie,
- tangenta al traiectorie, ![]() - axa verticala,
- axa verticala, ![]() - axa perpendiculara pe cele doua anterioare;
oxyz - triedrul RESAL legat de cadrul interior al suspensiei cardanice.
- axa perpendiculara pe cele doua anterioare;
oxyz - triedrul RESAL legat de cadrul interior al suspensiei cardanice.
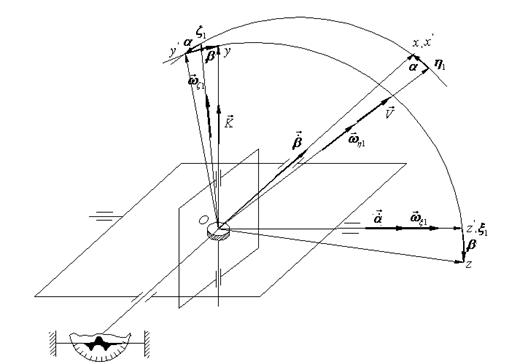
Fig. 1
Daca giroscopul este neperturbat
(![]() ),
triedrul oxyz se suprapune peste
),
triedrul oxyz se suprapune peste ![]() .
Giroorizontul perturbat trece din pozitia
.
Giroorizontul perturbat trece din pozitia ![]() in pozitia ox'y'z'
(rotatie cu unghiul
in pozitia ox'y'z'
(rotatie cu unghiul ![]() in jurul lui
in jurul lui ![]() )
si din pozitia ox'y'z' in pozitia oxyz
(rotatie cu unghiul
)
si din pozitia ox'y'z' in pozitia oxyz
(rotatie cu unghiul ![]() in jurul axei cadrului interior ox);
in jurul axei cadrului interior ox); ![]() - vitezele unghiulare absolute in jurul axelor
triedrului
- vitezele unghiulare absolute in jurul axelor
triedrului ![]() .
.
 (1)
(1)
Utilizand forma vectoriala a
ecuatiilor de precesie (![]() ;
;
![]() - momentul rezultant ce creeaza
- momentul rezultant ce creeaza ![]() ),
se obtin, pentru axele ox si, respectiv, oy, ecuatiile
),
se obtin, pentru axele ox si, respectiv, oy, ecuatiile
 (2)
(2)
Expresiile vitezelor unghiulare x si z vor fi urmatoarele
 (3)
(3)
Neglijand momentele exterioare si de amortizare din axele celor doua cadre de suspensie, momentele Mx , Mz au expresiile
 (4)
(4)
unde ![]() si
si ![]() sunt momentele de corectie din axele ox si oz,
iar
sunt momentele de corectie din axele ox si oz,
iar ![]() - momentele de frecare uscata din axele ox si
oz (Mfx si Mfz - valorile acestor momente).
- momentele de frecare uscata din axele ox si
oz (Mfx si Mfz - valorile acestor momente).
Inlocuind relatiile (3) si (4) in relatiile (2) scrise scalar (K z=-Mx , K x=Mz) si impartind ecuatiile la K se obtin
 (5)
(5)
unde fz=Mfx/K si fx=Mfz/K sunt vitezele unghiulare "de frecare" (datorate momentelor de frecare uscata din axele cadrelor suspensiei cardanice).
Giroorizont montat pe o platforma fixa fata de Pamant
Platforma fiinf fixa fata de Pamant (V = ![]() = 0), rezulta a
= 0), rezulta a![]() ,
si implicit,
,
si implicit, ![]() (verticala aparenta se suprapune peste
verticala reala).
(verticala aparenta se suprapune peste
verticala reala).
Ca urmare, neglijand termenii ![]() ecuatiile :
ecuatiile :

devin 

clear all;close all;
omega=(4.167/1000)*(pi/180);omegafx=0.15*(pi/180);omegafz=0.2*(pi/180);
fi=40*(pi/180);psi=30*(pi/180);V=7000/36;g=9.81;R=64*(10^5);
omegacsi1=-omega*(cos(fi))*(sin(psi));
omegazita1=omega*(sin(fi))+V/(R*cos(fi));
omegaita1=omega*(cos(fi))*(cos(psi));
epsilon1=4.5/(0.5*60);epsilon2=3/(0.5*60);
hi1=0;hi2=0;
sim('schema2');
t=1:length(alfa);
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta[t]');xlabel('timp[s]');ylabel('beta(rad)');grid;
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid

![]() Figura1
Figura1



Figura2



Figura3



Figura4

Figura5



Figura6

Figura7
Figura8
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2571
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved